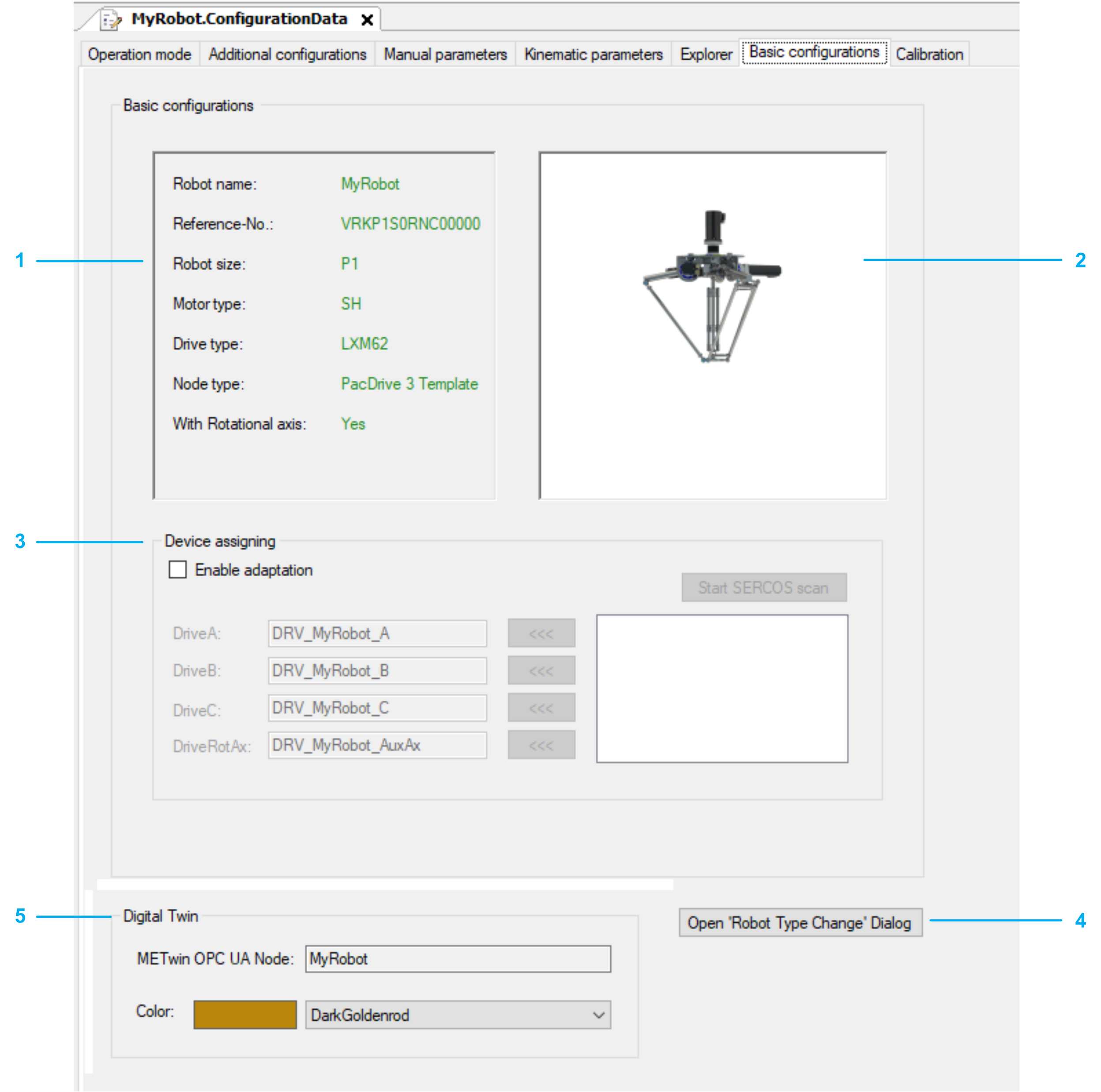
Basiskonfigurationen („Basic configurations“)
Überblick
|
1 |
Anzeige der Daten des ausgewählten Roboters. |
|
2 |
Anzeige einer Grafik des ausgewählten Roboters. |
|
3 |
: Weist Modulen Geräte zu. |
|
4 |
: Öffnet das Dialogfeld zur Änderung des Robotertyps. |
|
5 |
: Zeigt den Knotennamen des Roboters an, der für die Kommunikation verwendet und in EcoStruxure Machine Expert Twin angezeigt wird. Darüber hinaus können Sie die Farbe auswählen, die in EcoStruxure Machine Expert Twin zur Identifizierung des Roboters verwendet wird. |
Zuweisen von Geräten
Gehen Sie wie folgt vor, um einem Modul ein Gerät zuzuweisen:
|
Schritt |
Aktion |
|---|---|
|
1in der ^ |
Aktivieren Sie das Kontrollkästchen . |
|
2 |
Klicken Sie auf die Schaltfläche . |
|
3 |
Wählen Sie im Feld unterhalb der Schaltfläche ein Gerät aus. |
|
4 |
Weisen Sie das ausgewählte Gerät einem Modul zu, indem Sie auf die Schaltfläche neben dem entsprechendem Modul klicken. |
Öffnen des Dialogfelds zur Änderung des Robotertyps
Gehen Sie zur Änderung des Robotertyps vor wie folgt:
|
Schritt |
Aktion |
|---|---|
|
1in der ^ |
Klicken Sie auf die Schaltfläche . Ergebnis: Neben dem aktuellen Dialogfeld wird ein weiteres Dialogfeld geöffnet, um den Vergleich der vorhergehenden mit den neuen Einstellungen zu ermöglichen. |
|
2 |
Wählen Sie den neuen aus. Zur Identifizierung des Robotertyps können Sie den Filter , , (sofern eine Konfiguration möglich ist) und verwenden. |
|
3 |
Wählen Sie aus. Ergebnis: Die Konfiguration wird mit den neuen Parametern verarbeitet. Nach erfolgreichem Abschluss der Änderungen wird das Dialogfeld Robot ‘Type Change‘ Feature mit der Aufforderung geöffnet, einen Vorgang ‘Clean All‘ und ‘Rebuild All‘ durchzuführen. Bestätigen Sie mit OK. |
Detaillierte Informationen zur Konfiguration der Robotertypänderungen finden Sie unter Vorgehensweise zur Änderung der Robotertypen.