Vorgehensweise zur Änderung der Robotertypen
Einschränkungen
-
Robot name (Robotername)
-
Node type (Knotentyp)
-
Generate POU instance (Option, wenn „Node type“ gleich „Non Template“)
Auswählen des Robotertyps
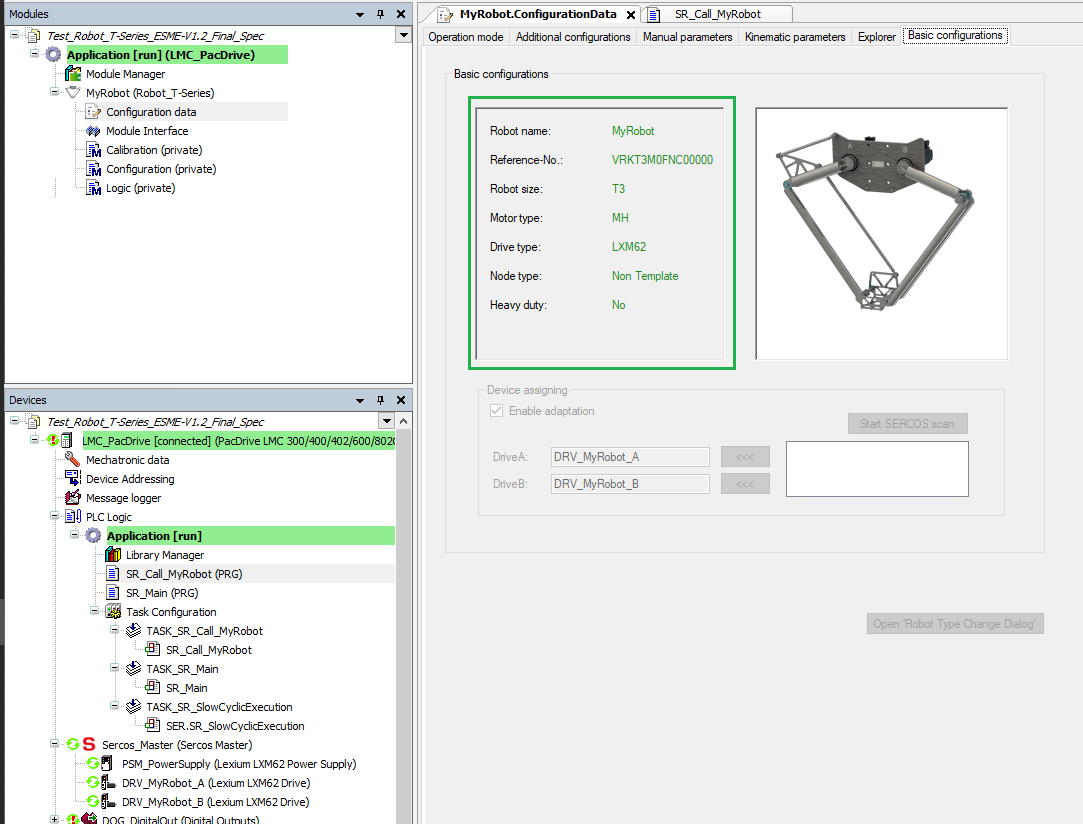
Dieses Beispiel bezieht sich auf einen T3-Roboter mit folgenden Basiskonfigurationsparametern:
Der T3-Roboter soll in einem T5-Roboter mit folgenden Konfigurationsparametern geändert werden:
-
VRKT3M0FNC00000: T3, Motor MH, Antrieb LXM62, keine Schwerlast
-
VRKT5L0FNC00000: T5, Motor ILM, Antrieb ILM62, keine Schwerlast
| Schritt | Aktion |
|---|---|
|
1 |
Öffnen Sie das Dialogfeld Robot Type Change. Wählen Sie aus und klicken Sie auf die entsprechende Schaltfläche. |
|
2 |
Wählen Sie mithilfe der verschiedenen Filter den benötigten Roboter aus. 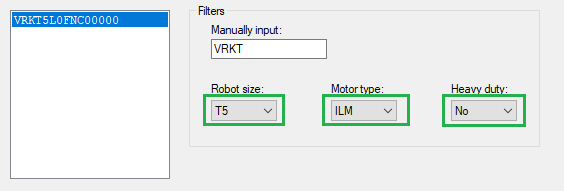
Ergebnis: Der neue Roboter wird im Dialogfeld Change Robot Type angezeigt. |
Start der Robotertypänderung
| Schritt | Aktion |
|---|---|
|
1 |
Wählen Sie aus.
HINWEIS: Die Verarbeitung aller Änderungen kann ein paar Minuten in Anspruch nehmen.
HINWEIS: Während der Programmausführung dürfen keine Aktionen in anderen Fenstern vorgenommen werden, bis der Prozess abgeschlossen ist.
|
|
2 |
Klicken Sie auf OK im Dialogfeld ‘Robot Type Change’ Feature. Ergebnis: Das Fenster Basic configuration wird mit dem neuen Robotertyp aktualisiert. |
Ergebnis der Typänderung
Das Ergebnis der Typänderung wird auf der aktualisierten Registerkarte Basic configurations angezeigt:
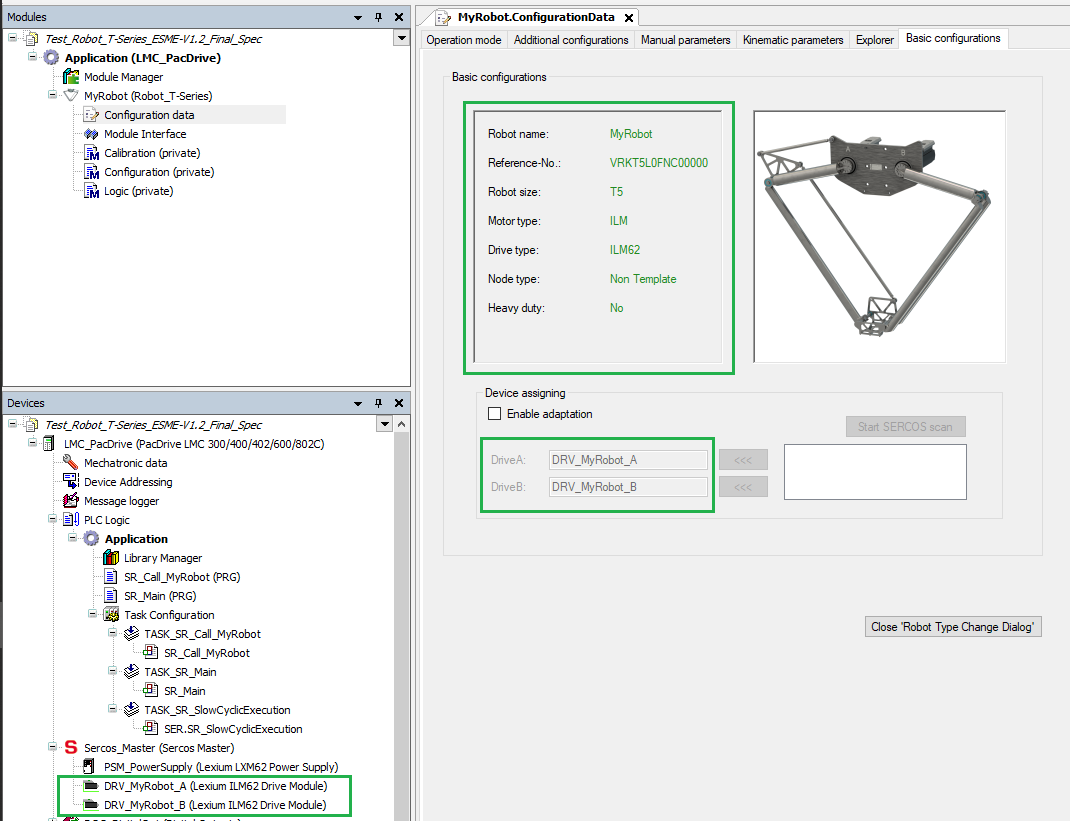
Folgende Änderungen wurden an der Roboterkonfiguration vorgenommen:
| Parameter | Vor Typänderung | Nach Typänderung |
|---|---|---|
|
VRK Reference |
VRKT3M0FNC00000 |
VRKT5L0FNC00000 |
|
Robot size |
T3 |
T5 |
|
Motor type |
MH |
ILM |
|
Drive type |
LXM62 |
ILM62 |
|
Sercos-Gerätebaumstruktur |
Antriebstypen zu Lexium ILM62 geändert. |
|