MotorTwoSpeedsTwoDirections - Funktionsbeschreibung
Funktionsbeschreibung
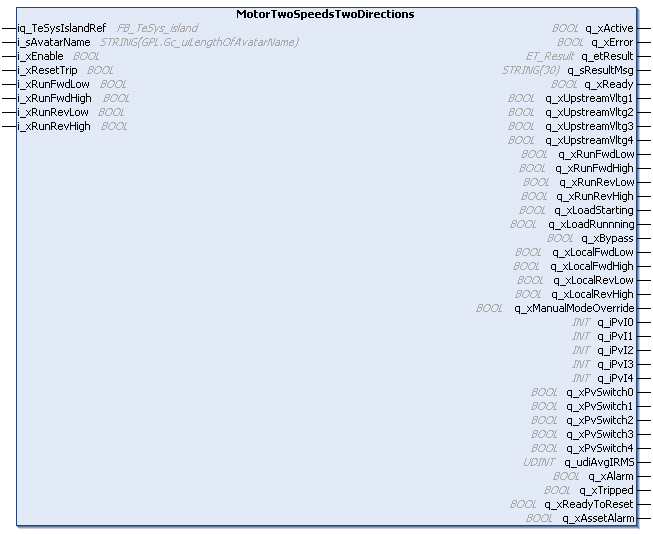
Der Funktionsbaustein MotorTwoSpeedsTwoDirections ermöglicht die Verwaltung eines Motors mit zwei Geschwindigkeiten in zwei Laufrichtungen (Vorwärts und Rückwärts).
Schnittstelle
|
Eingang |
Datentyp |
Beschreibung |
|---|---|---|
|
iq_TeSysIslandRef |
FB_TeSys_island |
Verweis auf das TeSys island-Gerät. |
|
i_sAvatarName |
STRING(GPL.Gc_uiLengthOfAvatarName) |
Verweis auf den in der TeSys island-Konfiguration definierten avatar. |
|
i_xEnable |
BOOL |
Bei einer steigenden Flanke am Eingang i_xEnable startet der zyklische Datenaustausch zwischen dem Funktionsbaustein und dem ausgewählten avatar. Solange i_xEnable TRUE ist, werden die zyklischen Daten bei jedem Steuerungszyklus ausgetauscht. Eine fallende Flanke am Eingang i_xEnable beendet den Datenaustausch. Siehe Verhalten der Funktionsbausteine mit Eingang i_xExecute. |
|
i_xResetTrip |
BOOL |
Wenn dieser Eingang auf TRUE gesetzt wird, wird ein Avatar-Auslöseereignis zurückgesetzt. |
|
i_xRunFwdLow |
BOOL |
Wenn dieser Eingang auf TRUE gesetzt wird, startet der Motor in Vorwärtsrichtung mit Niedergeschwindigkeit. |
|
i_xRunFwdHigh |
BOOL |
Wenn dieser Eingang auf TRUE gesetzt wird, startet der Motor in Vorwärtsrichtung mit Hochgeschwindigkeit. |
|
i_xRunRevLow |
BOOL |
Wenn dieser Eingang auf TRUE gesetzt wird, startet der Motor in Rückwärtsrichtung mit Niedergeschwindigkeit. |
|
i_xRunRevHigh |
BOOL |
Wenn dieser Eingang auf TRUE gesetzt wird, startet der Motor in Rückwärtsrichtung mit Hochgeschwindigkeit. |
|
Ausgang |
Datentyp |
Beschreibung |
|---|---|---|
|
q_xActive |
BOOL |
Wenn der Funktionsbaustein aktiv ist, wird dieser Ausgang auf TRUE gesetzt. |
|
q_xError |
BOOL |
Wenn dieser Ausgang auf TRUE gesetzt wird, wurde ein Fehler identifiziert. Für weitere Informationen, siehe q_etResult und q_etResultMsg, |
|
q_etResult |
ET_Result |
Stellt Diagnose- und Statusinformationen in Form numerischer Werte bereit. |
|
q_sResultMsg |
STRING[30] |
Stellt zusätzliche Diagnose- und Statusinformationen in Form von Textmeldungen bereit. |
|
q_xReady |
BOOL |
Gibt TRUE an, wenn der Avatar für den Empfang von Befehlen bereit ist. |
|
q_xUpstreamVltg1 |
BOOL |
Wenn dieser Ausgang auf TRUE gesetzt wird, hat der avatar erkannt, dass die vorgeschaltete Hauptspannungsversorgung des ersten Geräts vorhanden ist (Leistungsschalter geschlossen). |
|
q_xUpstreamVltg2 |
BOOL |
Wenn dieser Ausgang auf TRUE gesetzt wird, hat der avatar erkannt, dass die vorgeschaltete Hauptspannungsversorgung des zweiten Geräts vorhanden ist. |
|
q_xUpstreamVltg3 |
BOOL |
Wenn dieser Ausgang auf TRUE gesetzt wird, hat der avatar erkannt, dass die vorgeschaltete Hauptspannungsversorgung des dritten Geräts vorhanden ist. |
|
q_xUpstreamVltg4 |
BOOL |
Wenn dieser Ausgang auf TRUE gesetzt wird, hat der avatar erkannt, dass die vorgeschaltete Hauptspannungsversorgung des vierten Geräts vorhanden ist. |
|
q_xRunFwdLow |
BOOL |
Wenn dieser Ausgang auf TRUE gesetzt wird, läuft der Motor mit Niedergeschwindigkeit in Vorwärtsrichtung. |
|
q_xRunFwdHigh |
BOOL |
Wenn dieser Ausgang auf TRUE gesetzt wird, läuft der Motor mit Hochgeschwindigkeit in Vorwärtsrichtung. |
|
q_xRunRevLow |
BOOL |
Wenn dieser Ausgang auf TRUE gesetzt wird, läuft der Motor mit Niedergeschwindigkeit in Rückwärtsrichtung. |
|
q_xRunRevHigh |
BOOL |
Wenn dieser Ausgang auf TRUE gesetzt wird, läuft der Motor mit Hochgeschwindigkeit in Rückwärtsrichtung. |
|
q_xLoadStarting |
BOOL |
Wenn dieser Ausgang auf TRUE gesetzt wird, befindet sich der Motor in der Anlaufphase. |
|
q_xLoadRunning |
BOOL |
Wenn dieser Ausgang auf TRUE gesetzt wird, wurde ein Run- oder Close-Befehl ausgeführt und Strom fließt in die Pole (entspricht dem Motorbetrieb, jedoch auch für Avatars ohne Motor). |
|
q_xBypass |
BOOL |
Gibt den Status des Umgehungsbefehls an. |
|
q_xLocalFwdLow |
BOOL |
Gibt den Status des lokalen Befehls beim Vorwärtslauf mit geringer Geschwindigkeit an. |
|
q_xLocalFwdHigh |
BOOL |
Gibt den Status des lokalen Befehls beim Vorwärtslauf mit hoher Geschwindigkeit an. |
|
q_xLocalRevLow |
BOOL |
Gibt den Status des lokalen Befehls beim Rückwärtslauf mit geringer Geschwindigkeit an. |
|
q_xLocalRevHigh |
BOOL |
Gibt den Status des lokalen Befehls beim Rückwärtslauf mit hoher Geschwindigkeit an. |
|
q_xManualModeOverride |
BOOL |
Gibt den Überbrückungsstatus des manuellen Modus an. |
|
q_iPvI0 |
INT |
Gibt die Prozessvariablen Eingang 0 an. |
|
q_iPvI1 |
INT |
Gibt die Prozessvariablen Eingang 1 an. |
|
q_iPvI2 |
INT |
Gibt die Prozessvariablen Eingang 2 an. |
|
q_iPvI3 |
INT |
Gibt die Prozessvariablen Eingang 3 an. |
|
q_iPvI4 |
INT |
Gibt die Prozessvariablen Eingang 4 an. |
|
q_xPvSwitch0 |
BOOL |
Gibt die Prozessvariablen Schalter 0 an. |
|
q_xPvSwitch1 |
BOOL |
Gibt die Prozessvariablen Schalter 1 an. |
|
q_xPvSwitch2 |
BOOL |
Gibt die Prozessvariablen Schalter 2 an. |
|
q_xPvSwitch3 |
BOOL |
Gibt die Prozessvariablen Schalter 3 an. |
|
q_xPvSwitch4 |
BOOL |
Gibt die Prozessvariablen Schalter 4 an. |
|
q_udiAvgIRMS |
UDINT |
Zeigt den vom Gerät gemessenen durchschnittlichen Strom über die gesamte Lebensdauer an. (Einheit: mA) |
|
q_xAlarm |
BOOL |
Wenn dieser Ausgang auf TRUE gesetzt wird, wurde vom avatar ein Schutzereignis erkannt. |
|
q_xTripped |
BOOL |
Wenn dieser Ausgang auf TRUE gesetzt wird, wurde vom avatar ein Schutzauslöseereignis erkannt. |
|
q_xReadyToReset |
BOOL |
Wenn dieser Ausgang auf TRUE gesetzt wird, erfüllt der avatar die Bedingungen für einen Auslöse-Reset und kann über einen Befehl zum Auslöse-Reset zurückgesetzt werden. |
|
q_xAssetAlarm |
BOOL |
Wenn dieser Ausgang auf TRUE gesetzt wird, hat ein Leistungsgerät oder Sicherheitsschnittstellenmodul im avatar 90 % der bemessenen Betriebsvorgänge (pro avatar-Parameter) erreicht oder überschritten. |