Parallele Kinematik
Tripod mit linearen Achsen
Bei diesem System handelt es sich um 3 lineare Antriebe, die in einem definierten Winkel zu einander stehen. Die Antriebe bestehen aus 3 Schienen mit Verfahrschlitten. Die Werkzeugplatte ist durch Verbindungsstangen gleicher Länge mit den Verfahrschlitten verbunden. Eine paarweise Ausführung der Verbindungsstangen hält die Werkzeugplatte in der gleichen Orientierung parallel zum Boden. Die Kinematik kann die Werkzeugplatte in 3 Dimensionen bewegen.
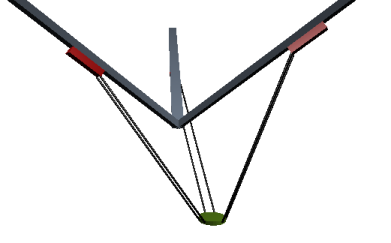
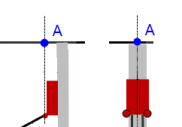
Die Vorwärts- und Rückwärtstransformation dieser Kinematik wird in den Funktionsbausteinen SMC_Trafo_Tripod_Lin und SMC_TrafoF_Tripod_Lin berechnet. Der Achswinkel des Tripods wird bestimmt durch den Winkel zwischen der Schiene und der vertikalen Achse (dAxisAngle).
Mechanische Voraussetzungen, Koordinatensystem
-
Die Länge der 3 Achsen sind identisch
-
Die Längen der Verbindungsstangen sind identisch
-
Der Abstand des Verbindungsstangen-Paares zueinander ist identisch bei allen Paaren
-
Der Achswinkel zwischen Antriebsschiene und vertikaler Achse ist identisch bei allen 3 Antrieben. Der Winkel kann zwischen 0° und 90° liegen.
-
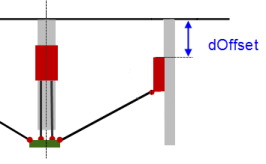
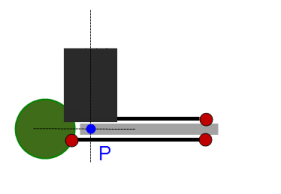
Die Bewegung des Punktes zwischen den Verbindungsstangen-Gelenken auf dem Schlitten definiert die Achse.
-
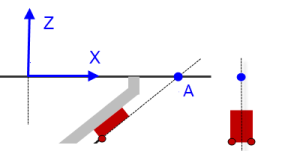
Das XYZ-Koordinatensystem ist rechtshändig. Die Vektoren X und Y liegen horizontal und Z zeigt nach oben. Der Ursprung ist so definiert, dass die Schnittpunkte der 3 Bewegungsachsen mit der XY-Ebene (Grafik unten - Punkte A) auf einem Kreis um die Position [0,0,0] liegen.
|
Name |
Beschreibung |
|---|---|
|
|
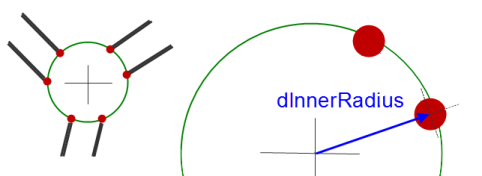
Abstand von der Mitte der Werkzeugplatte zu den Angriffspunkten der Verbindungsstangen
|
|
|
|
|
|
Länge der Verbindungsstangen |
|
|
Abstand der Verbindungsstangen-Paare zueinander |
|
|
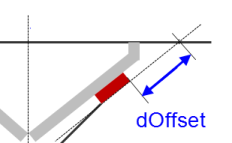
Der Punkt A der ersten Achse definiert standardmäßig die X-Achse. Über den Offset kann die Konstruktion um die Z-Achse gedreht werden. In diesem Fall liegt der Punkt A nicht mehr auf der X-Achse.
|
|
|
Mit dem Offset kann der Positionswert der Achse in ihrer Grundstellung auf 0 gesetzt werden.
|
|
|
|
|
|
|
|
Informationen zu anderen Parametern finden Sie in der Bibliotheksbeschreibung. |
|
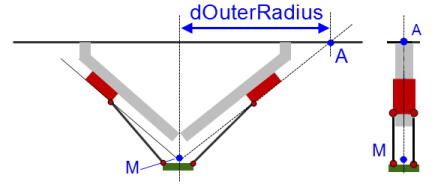 A ist der Schnittpunkt der Achse mit der XY-Ebene.
A ist der Schnittpunkt der Achse mit der XY-Ebene.
Siehe auch
Tripod mit vertikalen Achsen
Dieses System ist ein Spezialfall der oben beschriebenen Kinematik mit den gleichen mechanischen Voraussetzungen. Der Winkel dAxisAngle zwischen den Führungsschienen und der vertikalen Achse ist 0 Grad - die Führungsschienen stehen parallel zur vertikalen Achse.
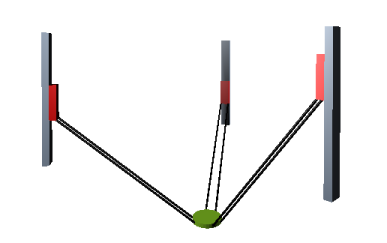
Die Vorwärts- und Rückwärtstransformation dieser Kinematik wird in den Funktionsbausteinen SMC_Trafo_Tripod_Lin und SMC_TrafoF_Tripod_Lin berechnet. Der Achswinkel des Tripods wird bestimmt durch den Winkel zwischen der Schiene und der vertikalen Achse (dAxisAngle).
|
Name |
Beschreibung |
|---|---|
|
|
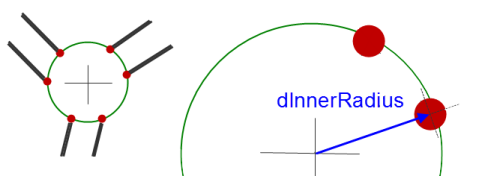
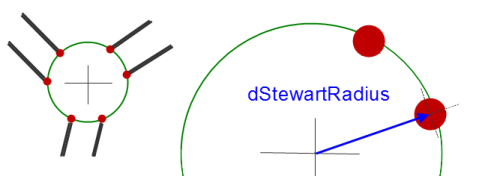
Der Parameter definiert den Radius des Kreises, der durch die 6 Angriffspunkte der Verbindungsstangen an der Werkzeugplatte beschrieben wird.
|
|
|
|
|
|
Länge der Verbindungsstangen |
|
|
Abstand der Verbindungsstangenpaare zueinander |
|
|
Der Punkt A der ersten Achse definiert standardmäßig die X-Achse. Über den Offset kann die Konstruktion um die Z-Achse gedreht werden. In diesem Fall liegt der Punkt A nicht mehr auf der X-Achse.
|
|
|
Mit dem Offset kann der Positionswert der Achse in ihrer Grundstellung auf 0 gesetzt werden.
|
|
|
|
|
|
|
|
Informationen zu anderen Parametern finden Sie in der Bibliotheksbeschreibung. |
|
Siehe auch
Tripod mit rotatorischen Achsen
Beim einem Tripod ist die Kinematik durch 3 Drehantriebe realisiert, die über Arme und Verbindungsstangen mit der Werkzeugplatte verbunden sind.
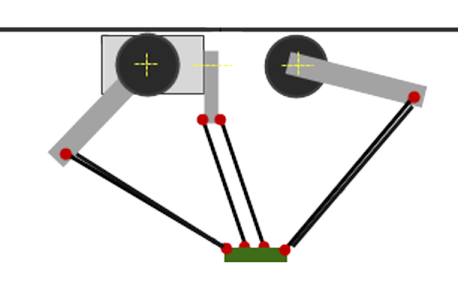
Der Ursprung des Koordinatensystems ist dort, wo sich der Mittelpunkt der Werkzeugplatte befindet, wenn alle 3 Arme in horizontaler Position sind.
Die Vorwärts- und Rückwärtstransformation dieser Kinematik wird in den Funktionsbausteinen SMC_TRAFO_Tripod_Arm und SMC_TRAFOF_Tripod_Arm berechnet.
Mechanische Voraussetzungen, Koordinatensystem
-
die Längen aller 3 Arme sind identisch
-
die Längen aller Verbindungsstangen sind identisch
-
der Abstand des Verbindungsstangen-Paares zueinander ist identisch bei allen Paaren
|
Name |
Beschreibung |
|---|---|
|
|
|
|
|
|
|
|
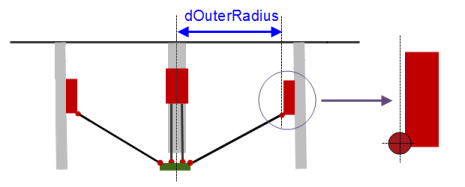
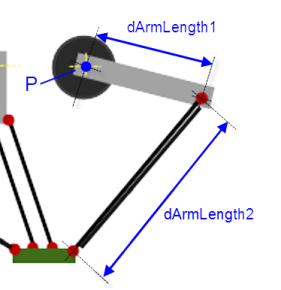
Der Parameter beschreibt den Radius des Kreises, der durch die 3 Punkte P der Antriebe beschrieben wird.
|
|
|
Der Parameter beschreibt den Radius des Kreises, der durch die 6 Angriffspunkte der Verbindungsstangen an der Werkzeugplatte beschrieben wird.
|
|
|
Abstand der Verbindungsstangen-Paare zueinander |
|
|
|
|
|
|
|
|
|
|
Informationen zu anderen Parametern finden Sie in der Bibliotheksbeschreibung. |
|
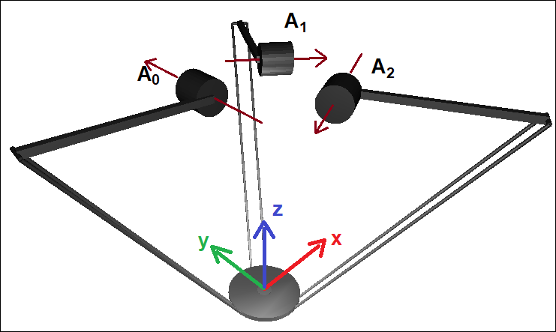
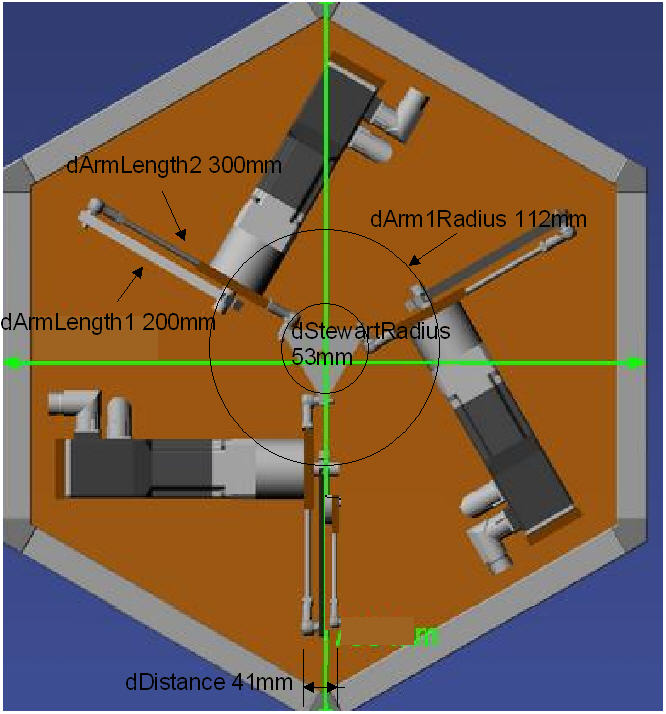
Das Bild zeigt die Nullposition aller Achsen (die drei oberen Arme sind horizontal). Das MCS wird an der Werkzeugplatte angezeigt. Die Pfeile an den Achsen A0, A1 und A2 zeigen die Drehrichtung der Antriebe gemäß der Rechtshandregel an.
|
Maschinenkoordinatensystem (MCS) |
|
|
Ursprung |
Definiert im Mittelpunkt der Werkzeugplatte, wenn alle 3 oberen Arme (diejenigen, die direkt mit A0, A1 oder A2 verbunden sind) in horizontaler Position sind. |
|
X |
Zeigt, vom Ursprung aus gesehen, weg vom ersten Motor (A0), parallel zum oberen Armteil des ersten Arms. |
|
Y |
Wird durch X und Z bestimmt, so dass das MCS rechtshändig wird. |
|
Z |
Senkrecht zur Werkzeugplatte. Zeigt von der Werkzeugplatte in Richtung der Motoren. |
Die zugehörigen Transformationen werden durch folgende Bausteine SMC_TRAFO_Tripod_Arm und SMC_TRAFOF_Tripod_Arm ausgeführt:
Beispiel 3S Tripod
Transformationseinstellungen
tta:
SMC_TRAFO_Tripod_Arm := (dArmLength1:=200, dArmLength2:=300, dArm1Radius:=112, dStewartRadius:=53,dDistance:=41,dMaxAngleBallJoint:=60);
ttaf:
SMC_TRAFOF_Tripod_Arm := (dArmLength1:=200, dArmLength2:=300, dArm1Radius:=112, dStewartRadius:=53,dDistance:=41);
Siehe auch