6-Achs-Knickarmroboter
Transformation eines Knickarmroboters mit 6 Drehachsen und 6 Freiheitsgraden (DoF). Die 3 Orientierungsachsen des Roboterarms schneiden sich in einem einzigen Punkt, dem Handgelenksmittelpunkt.
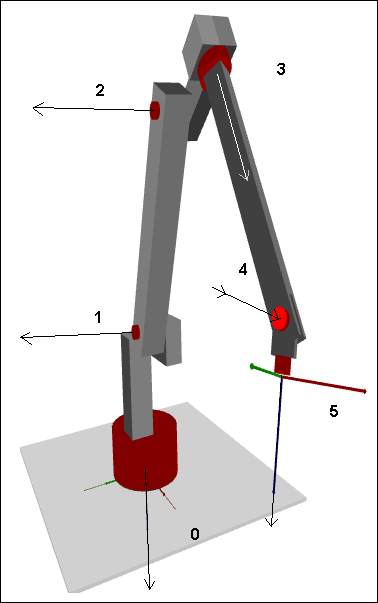
Die Funktionsbausteine SMC_Trafo_ArticulatedRobot_6DOF und SMC_TrafoF_ArticulatedRobot_6DOF implementieren Vorwärts- und Rückwärtstransformationen eines Knickarmroboters mit sechs drehenden Achsen. In der Abbildung ist das Weltkoordinatensystem unten an der Achse 0 eingezeichnet. Die z-Achse zeigt nach unten, die x-Achse zeigt nach vorne auf in Richtung des Werkzeugmittelpunkts (TCP). Der Ursprung des Weltkoordinatensystems ist der Schnittpunkt von Achse 0 und dem Boden des Roboters.
Definition der Achsen
Die Drehachsen sind durch schwarze Pfeile gekennzeichnet. Die positive Drehrichtung ergibt sich aus der Rechte-Hand-Regel. Wenn Achse 0 sich zum Beispiel in positiver Richtung dreht, dann rotiert der Roboter von oben betrachtet im Uhrzeigersinn.
Die Achsen sind auf die folgenden Bereiche beschränkt:
-
Achse 0, 1, 3, and 4: ]-180°, 180°[
-
Achse 2: [-90°, 180°]
-
Achse 5: nicht beschränkt, der Bereich darf größer als 360° sein.
Referenzposition und Maße
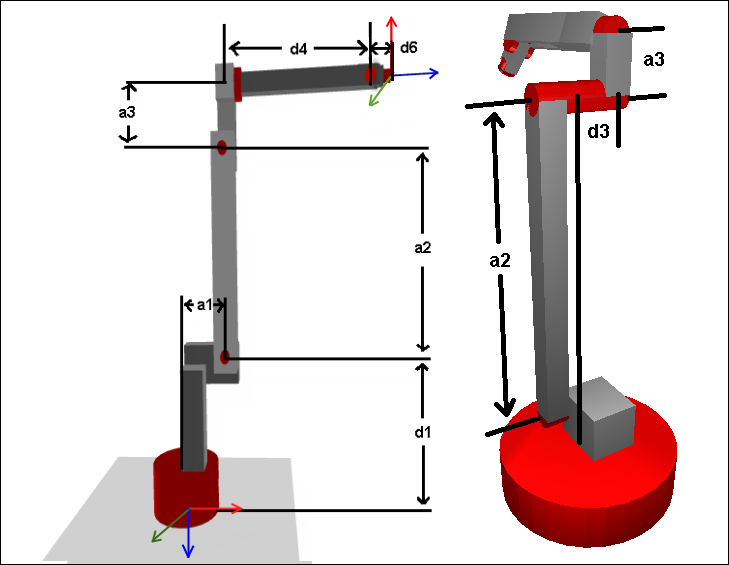
Die linke Abbildung zeigt die Referenzposition der Kinematik, also die Position, in der alle Achsen in ihrer Nullposition sind. Tragen Sie die hier gezeigten Maße in die Konfigurationsstruktur SMC_TrafoConfig_ArticulatedRobot_6DOF ein. Name und Vorzeichen der Parameter sind gemäß der Denavit-Hartenberg Konvention. Die rechte Abbildung zeigt den zusätzlichen Denavit-Hartenberg-Parameter d3.
Bitte beachten Sie:
-
a1, a3, d4, d6 muss >= 0 sein
-
a2 muss >0 sein (>
g_fSMC_CNC_EPS) -
d1 muss <= 0 sein