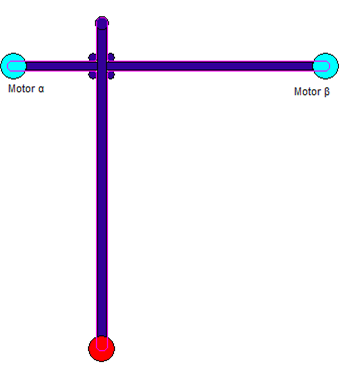
T-Portalsystem mit stationären Achsen
Dieses kinematische System ähnelt den H-Portalsystemen. Auch hier sind die Antriebe stationär angebracht und der Werkzeugträger wird mit Hilfe eines Riemen bewegt.
Die Transformation, die von den Modulen SMC_TRAFO_GantryT2 und SMC_TRAFOF_GantryT2 ausgeführt werden, sind für die folgenden Antriebskonstellationen ausgelegt:
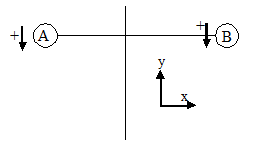
Beachten Sie, dass für diese Transformation eine spezielle Referenzfahrt nötig ist.
Wenn Sie eine Bewegung in X-Richtung ausführen, müssen Sie die Antriebe A und B mit gleicher Geschwindigkeit bewegen. Wenn Sie eine reine Y-Bewegung ausführen, müssen Die Antriebe gegenläufig drehen. Hat der Antrieb die Referenzposition gefunden, werden die vom Vorwärtstransformationsfunktionsbaustein errechneten X- und Y-Werte als Offset (dOffsetX und dOffsetY) verwendet.
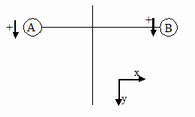
Die Funktionsbausteine SMC_TRAFO_GantryT2_O und SMC_TRAFOF_GantryT2_O führen die gleiche Berechnung mit folgender Konstellation aus:
Siehe auch