ST_Delta3AxKinematics – General Information
Structure Elements
|
Name |
Data type |
Description |
|---|---|---|
|
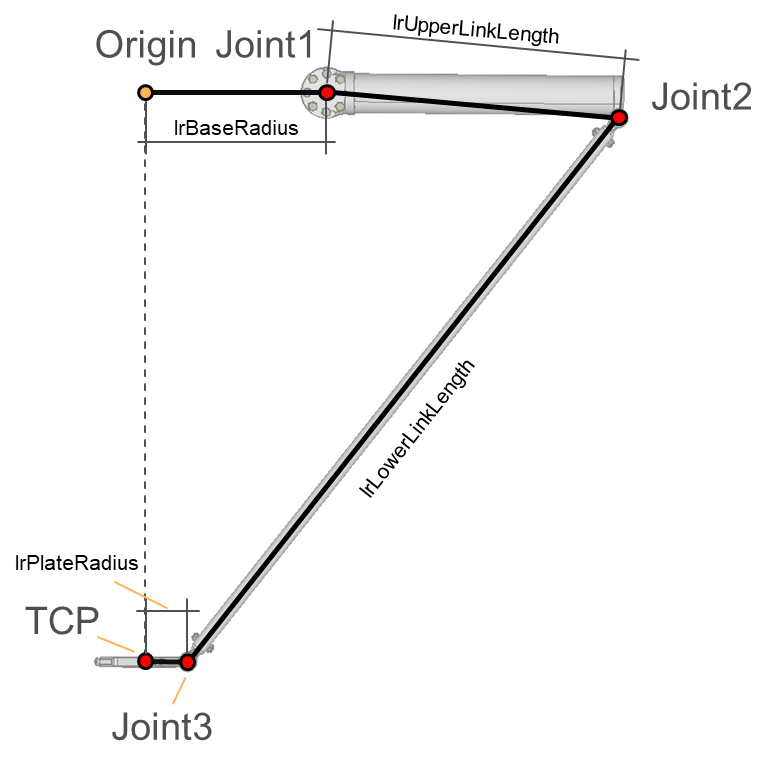
LREAL |
Base radius value for the robot. |
|
|
LREAL |
The length of the upper link of the robot. |
|
|
LREAL |
The plate radius for the robot. |
|
|
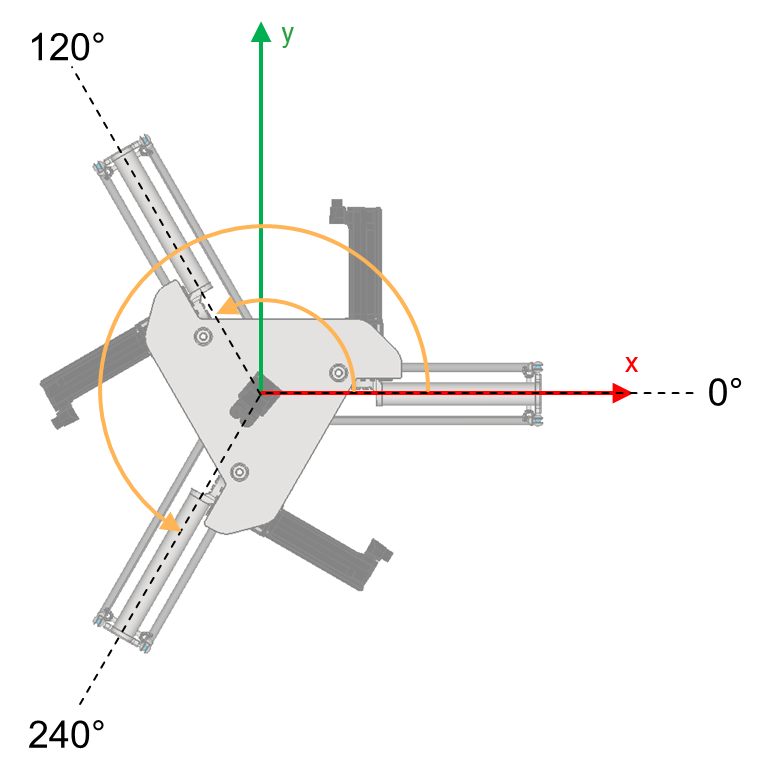
ARRAY [1... Gc_udiDelta3AxNumberOfJoints] OF LREAL |
The angle of each chain with reference to the X-axis of the coordinate system of the robot. The default values are [0, 120, 240] degrees. |
Default set of chain angles for a Delta3Ax robot.