Technical Data of the Motor and the Gearbox
Overview
For further information about the motor, record the motor reference on the type plate and refer to the corresponding motor manual.
For further information about the gearbox, record the gearbox reference on the type plate and refer to the corresponding gearbox manual.
Third-Party Motors
When using a third-party motor, take special care that the maximum permissible drive torque is not exceeded. Otherwise the robot could be rendered inoperable.
| WARNING | |
|---|---|
The following table presents the maximum permissible torques at the respective axes.
|
Parameter |
Unit |
Robot type |
|
|---|---|---|---|
|
VRKP0WM, VRKP0WM•••••E00, VRKP1WM, VRKP1WM•••••E00 |
VRKP2WM, VRKP4WM, VRKP5WM, VRKP6WM, VRKP6WM•••••E00 |
||
|
Maximum drive torque on the input side of the gearbox at the main axes Mmax |
Nm (lbf-in) |
0.9 (7.9) |
4 (35.4) |
|
Maximum speed on the input side of the gearbox at the main axes |
1/min |
7500 |
|
|
Maximum drive torque on the input side of the gearbox at the rotational axis Mmax |
Nm (lbf-in) |
0.45 (4) |
|
|
Maximum speed on the input side of the gearbox at the rotiaional axis |
1/min |
13000 |
|
For information about mounting the motor to the gearbox, refer to the corresponding gearbox manual.
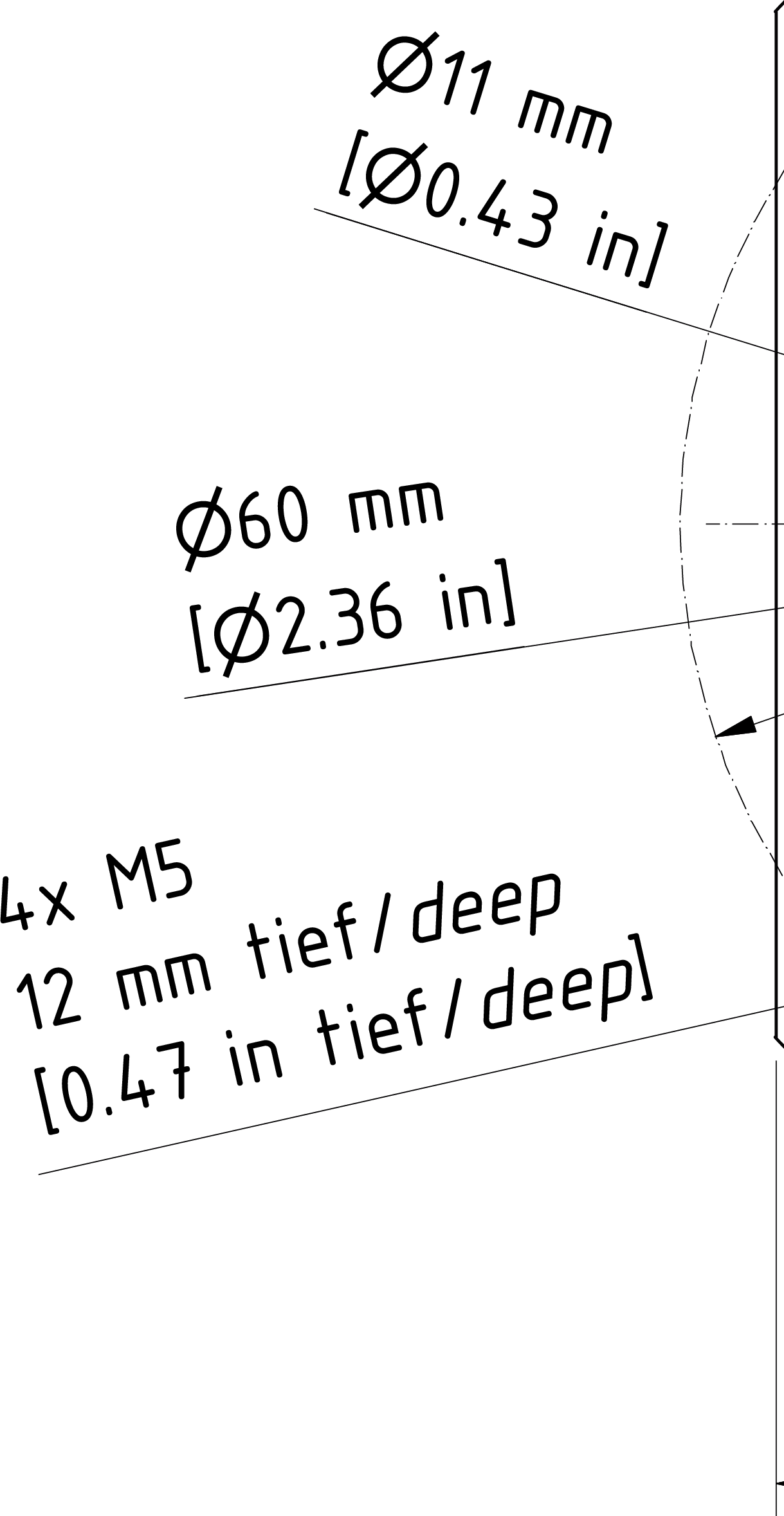
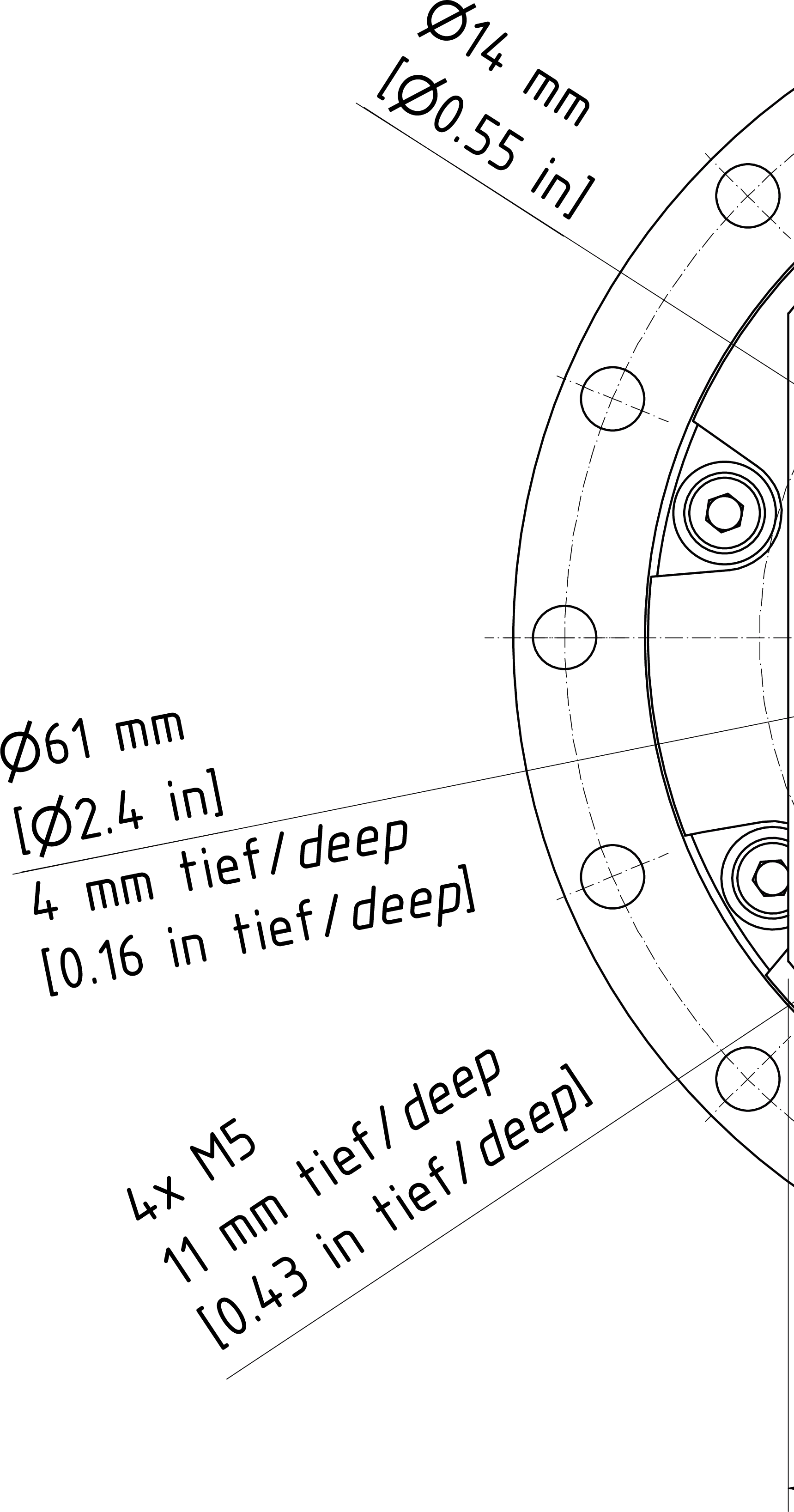
The following figure shows the dimensions of the input side of the adapter plate of the gearboxes at the main axes.
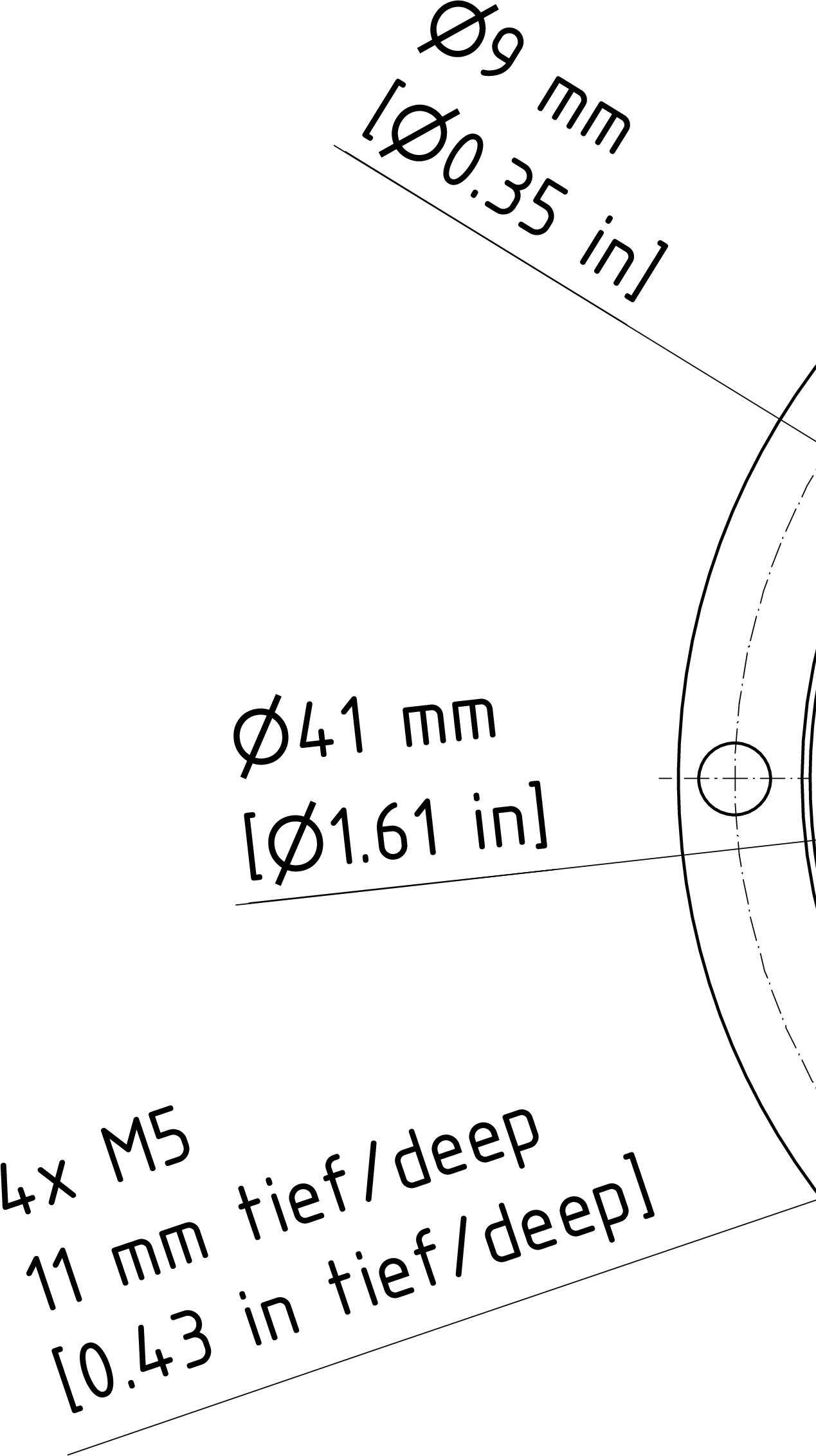
The following figure shows the dimensions of the input side of the adapter plate of the gearbox at the rotational axis.