Change of SCARA Arm Configuration
Overview
Changing the arm configuration of a SCARA with identical start and end positions may result in extensive accelerations on axis B. This effect is amplified if the length of link A is equal to the length of link B. Define a via point to avoid a straight in and out movement of the TCP. Connect the move commands to the via point and to the desired end position with a blending zone to get a smooth transition without stop of the robot.
Example Description
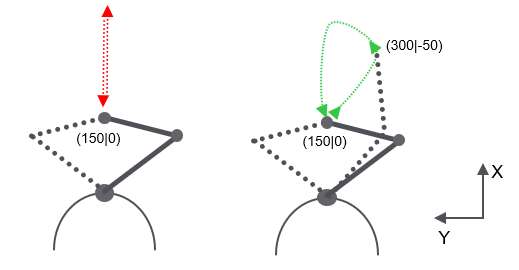
Start position: X = 150, Y = 0 , ArmConfiguration at start = Right
stViaPoint.lrX := 300.0;
stViaPoint.lrY := -50.0;
stTarget.lrX := 150.0;
stTarget.lrY := 0.0;
MoveJ(i_stTarget := stViaPoint,
i_etArmConfiguration := ET_ArmConfiguration.Right,
i_lrMaxZone := 50.0,
i_udiSegmentId := 10);
MoveJ(i_stTarget := stTarget,
i_etArmConfiguration := ET_ArmConfiguration.Left,
i_lrMaxZone := 0.0,
i_udiSegmentId := 20);