FB_MotorDataDelete - General Information
|
Type: |
Function block |
|
Available as of: |
V1.0.0.0 |
|
Inherits from: |
– |
|
Implemented: |
– |
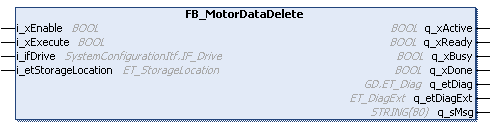
This function block deletes motor data in the drive or motor encoder, depending on the selected i_etStorageLocation.
NOTE: Execute this POU only when required for application needs. The encoder memory area has a limited number of write cycles, frequent execution of the POU can lead to encoder damage.
Sercos must be in phase 2.
This function block deletes the motor data in the selected storage location. After the deletion of the old motor data, the new motor data can be written to the axis using FB_MotorDataWrite.
NOTE: The POU has a long processing time (> 1 s). Thus, it must be executed in a task that is not time-critical and with an appropriate watchdog time.
|
Input |
Data type |
Description |
|---|---|---|
|
i_xEnable |
BOOL |
A rising edge FALSE -> TRUE activates the POU, a falling edge TRUE -> FALSE deactivates the POU. A deactivated POU does not execute any actions. |
|
i_xExecute |
BOOL |
FALSE -> TRUE: The function block deletes the motor data in the selected axis. While the deletion is running q_xBusy = TRUE. After the deletion is completed q_xDone changes to TRUE. |
|
i_ifDrive |
Input for the axis that shall be controlled. |
|
|
i_etStorageLocation |
Storage location from which the motor data is read. |
|
Output |
Data type |
Description |
|---|---|---|
|
q_xActive |
BOOL |
TRUE: The POU is active and has to be executed further. FALSE: The POU is inactive. |
|
q_xReady |
BOOL |
The POU is ready to delete the motor data. Verify whether the requirements are met if the state is FALSE. |
|
q_xBusy |
BOOL |
TRUE: The POU executes the issued user command (deleting motor data in the drive). FALSE: The POU is waiting for further user commands. |
|
q_xDone |
BOOL |
TRUE: The user command (delete motor data in the drive) has been executed. Using FB_MotorDataWrite, new motor data can be programmed. FALSE: The user command is being executed, or none has been issued yet. |
|
q_etDiag |
General, library-independent statement on the diagnostic. A value unequal to GD.ET_Diag.Ok corresponds to a diagnostic message. |
|
|
q_etDiagExt |
POU-specific output on the diagnostic. q_etDiag = GD.ET_Diag.Ok -> status message q_etDiag <> GD.ET_Diag.Ok -> diagnostic message |
|
|
q_sMsg |
STRING[80] |
Event-triggered message which gives more detailed information on the diagnostic state. |
|
q_etDiag |
q_etDiagExt |
Enumeration value |
Description |
|---|---|---|---|
|
OK |
6 |
The POU verifies whether the drive contains motor data. |
|
|
OK |
17 |
The motor data in the axis is being deleted. |
|
|
OK |
16 |
The POU is disabled. |
|
|
OK |
10 |
The command has successfully been performed. |
|
|
OK |
3 |
The POU is waiting for execution. |
|
|
OK |
2 |
The POU is waiting for Sercos phase 2. |
|
|
DriveConditionInvalid |
9 |
Deleting motor data is not permitted for motors of Schneider Electric. |
|
|
DriveConditionInvalid |
8 |
No motor data found on the drive. |
|
|
InputParameterInvalid |
4 |
The drive does not support the function. |
|
|
InputParameterInvalid |
41 |
The selected storage location for the electronic motor nameplate is invalid. |
|
|
SercosConditionInvalid |
7 |
Sercos communication is not possible. |
|
Enumeration name: |
CheckingMotorDataInDrive |
|
Enumeration value: |
6 |
|
Description: |
The POU verifies whether the drive contains motor data. |
The function block is being executed. Waiting until q_xDone has the value TRUE.
|
Enumeration name: |
DeleteMotorDataNotAllowed |
|
Enumeration value: |
9 |
|
Description: |
Deleting motor data is not permitted for motors of Schneider Electric. |
|
Cause |
Solution |
|---|---|
|
The motor data in the selected axes must not be deleted. |
Verify the selected axis. |
|
Enumeration name: |
DeletingMotorData |
|
Enumeration value: |
17 |
|
Description: |
The motor data in the axis is being deleted. |
The function block is being executed. Waiting until q_xDone has the value TRUE.
|
Enumeration name: |
Disabled |
|
Enumeration value: |
16 |
|
Description: |
The POU is disabled. |
|
Cause |
Solution |
|---|---|
|
The POU is disabled. |
Set the i_xEnable input from FALSE to TRUE to enable the POUs. |
|
Enumeration name: |
Done |
|
Enumeration value: |
10 |
|
Description: |
The command has successfully been performed. |
The motor data has been deleted successfully. New motor data may be written to the drive.
FunctionNotSupportedByThisDevice
|
Enumeration name: |
FunctionNotSupportedByThisDevice |
|
Enumeration value: |
4 |
|
Description: |
The drive does not support the function. |
|
Cause |
Solution |
|---|---|
|
Invalid object type |
Verify the selected object. |
|
Enumeration name: |
InvalidStorageLocation |
|
Enumeration value: |
41 |
|
Description: |
The selected storage location for the electronic motor nameplate is invalid. |
|
Cause |
Solution |
|---|---|
|
There is no Hiperface encoder connected to the physical machine encoder input. |
Connect a Hiperface encoder to the physical machine encoder input. |
|
The encoder does not provide sufficient memory or there is no encoder. |
Connect an encoder with Hiperface interface with a minimum of 2 kBytes physical memory. |
|
Enumeration name: |
NoMotorDataFoundInDrive |
|
Enumeration value: |
8 |
|
Description: |
No motor data found on the drive. |
|
Cause |
Solution |
|---|---|
|
No motor data is stored in the selected axis. |
Verify the selected axis. |
SercosCommunicationNotPossible
|
Enumeration name: |
SercosCommunicationNotPossible |
|
Enumeration value: |
7 |
|
Description: |
Sercos communication is not possible. |
|
Cause |
Solution |
|---|---|
|
Sercos communication is not possible. |
Verify the Sercos phase and the wiring. |
|
Enumeration name: |
WaitForExecute |
|
Enumeration value: |
3 |
|
Description: |
The POU is waiting for execution. |
The POU is active and ready for execution. q_xReady is TRUE.
|
Enumeration name: |
WaitForSercosPhase2 |
|
Enumeration value: |
2 |
|
Description: |
The POU is waiting for Sercos phase 2. |
The POU is active and is waiting for Sercos phase 2. q_xReady is FALSE.