Tracking Systems Tab
Overview
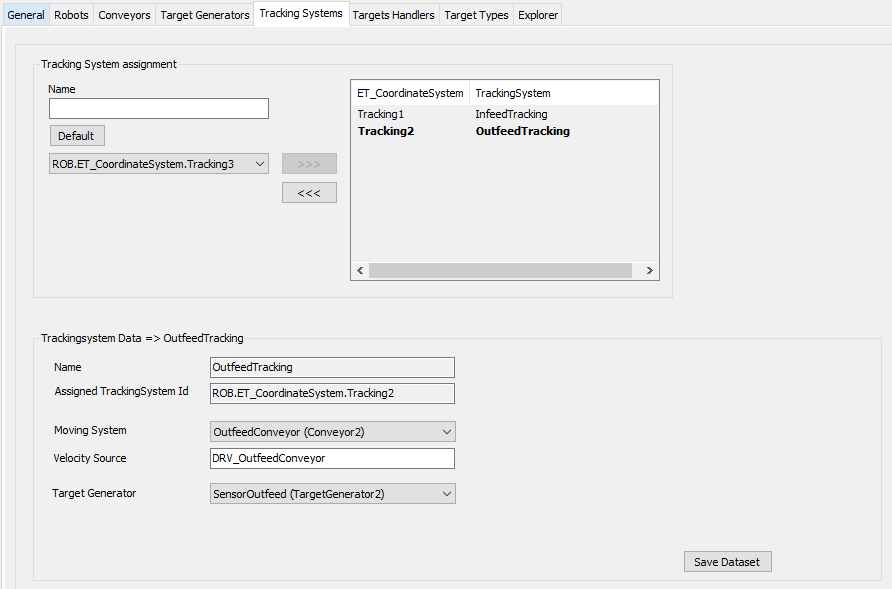
In this tab, you can configure the tracking systems of the RobotCell Module.
You can configure up to 30 tracking systems. To use a tracking system for a robot, you have to assign it in the Tracking System Data of the Robots tab .
Also refer to How to Use Conveyor of Node Type 'Physical Encoder' in RobotCell Module.
Tracking System Assignment
|
Element |
Description |
|---|---|
|
|
Enter a name for the tracking system. |
|
|
Click this button to create a default for the tracking system. The name is derived from the selected . |
|
Select a tracking system Id from the list. Possible values are: ... An already assigned tracking system Id is no longer available in the list. If you remove a tracking system Id, it is available in the list again. |
|
|
|
Click this button to use the created tracking system in the RobotCell Module. Result: The tracking system is displayed in the list on the right of . |
|
|
Click this button to remove the tracking system from being used in the RobotCell Module. Result: The tracking system is displayed in the list on the left of . If you use the button, you are prompted by a dialog box to confirm. |
Tracking System Data
Select a tracking system in the list on the right of to display the dataset of the tracking system.
|
Element |
Description |
|---|---|
|
|
Name of the selected tracking system. |
|
|
Id of the selected tracking system. |
|
|
Select a conveyor from the list. |
|
|
Enter the velocity source, for example, the drive of a conveyor. |
|
|
Select a camera, sensor or external target generator from the list. |
|
|
Click this button to save the modified data. Also refer to Verifying of Parameter Modifications. |