EtherCAT Configurator
Refer to the general description for information about the following tabs of the device editor.
Only in the case of special features is there an additional help page for the specific device editor.
If the "<device name> Parameters" tab is not shown, then select the Show generic device configuration editors option in the CODESYS options (Device Editor category).
The configuration of EtherCAT modules is based on the device description files for the master and slave devices employed and can be adapted in the project in configuration dialogs. In order to ensure the simplest and most error-free use possible, we recommend for standard applications that you activate the option for the Automatic Configuration of the master, so that the majority of the configuration settings are performed automatically.
Requirements
The WinPCap 4.1.3 driver is required when using EtherCAT devices with CODESYS Control Win V3. The WinPCap program library is available as a free download (for example, form winpcap.org). After installing the driver or inserting a USB network adapter, Windows needs to be restarted so that the adapters can be selected.
Newer Wireshark versions install npcap instead of WinPCap. As a result, operation is not possible. In this case, you need to uninstall npcap:
When using CODESYS Control RTE V3, you have to replace the default network driver in the Windows Device Manager with a special CODESYS driver. For more details, see the help for the CODESYS Control RTE V3 runtime.
You also have to enable the respective runtime components in the file CODESYSControl.cfg.
-
Component.<subsequent number>=CmpEt100DrvAvailable for Intel Pro 100
-
Component.<subsequent number>=CmpEt1000DrvAvailable for Intel Pro 1000
-
Component.<subsequent number>=CmpRTL81x9MpdAvailable for RTL8139.
-
Component.<subsequent number>=CmpRTL8169MpdAvailable for Realtek RTL8169 or RTL8168 (PCIe version))
You can also enable the runtime components in the configuration dialog of the CODESYS Control RTE V3.
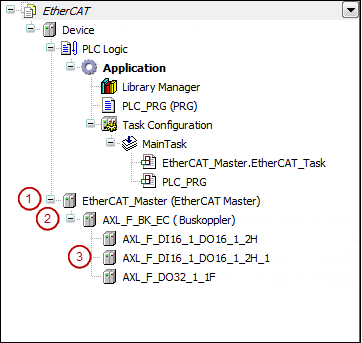
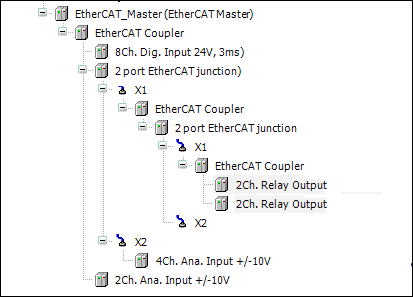
EtherCAT topology
In addition to the line and tree topology, CODESYS also supports the EtherCAT star topology. Special EtherCAT branches ( '2 port EtherCAT junction' in the example) are required for the configuration of an EtherCAT star topology. A modular EtherCAT star can be realized by the use of several branches. Individual devices or complete EtherCAT lines can be connected with the branches. An EtherCAT branch is marked by the sign  .
.
Optional devices
The Optional devices function can be used for variable hardware configurations. At the start of the stack, the system checks whether optional devices are available. If the devices are not found, then they are deactivated automatically. However, the devices can also be activated at a later date if, for example, it is a device at the end of the network line. On the other hand, if the Automatically restart slaves option is selected, then the activated devices are automatically switched to "operational", thereby activating the process data.
See also
Access to the EtherCAT configuration by the application takes place via instances of the EtherCAT master and EtherCAT slave. If the EtherCAT master or EtherCAT slaves are inserted as objects into a project, instances are automatically created for master and slaves that can be addressed in the application program. For example a restart, a stop or a status check of the EtherCAT device can be performed from the application.
The library IODrvEtherCAT provides function blocks for reading and writing individual parameters, even during bus operation. An example for writing and reading SDOs with CAN via EtherCAT is provided in the CODESYS Store.
See also