MC_Halt
Descripción de funciones
Este bloque de funciones detiene el movimiento en curso. Este bloque de funciones puede ser cancelado por otros bloques de funciones. Consulte MC_Stop para obtener información sobre paradas que no pueden cancelarse.
Cuando se inicia este bloque de funciones, se cancela la ejecución de cualquier otro bloque de funciones.
La ejecución del bloque de funciones MC_Halt se puede cancelar con cualquier otro bloque de funciones en modalidad sin búfer.
Si se activa el bloque de funciones MC_Halt, el eje pasa al estado operativo de PLCopen Discrete Motion y permanece en este estado hasta que se detiene el motor o se inicia otro bloque de funciones. Una vez que el motor se ha detenido, se establece la salida Done y el eje pasa al estado de funcionamiento StandStill.
A diferencia del bloque de funciones MC_Stop, diseñado principalmente para funciones de parada de emergencia, el bloque de funciones MC_Halt está diseñado para el funcionamiento habitual del eje.
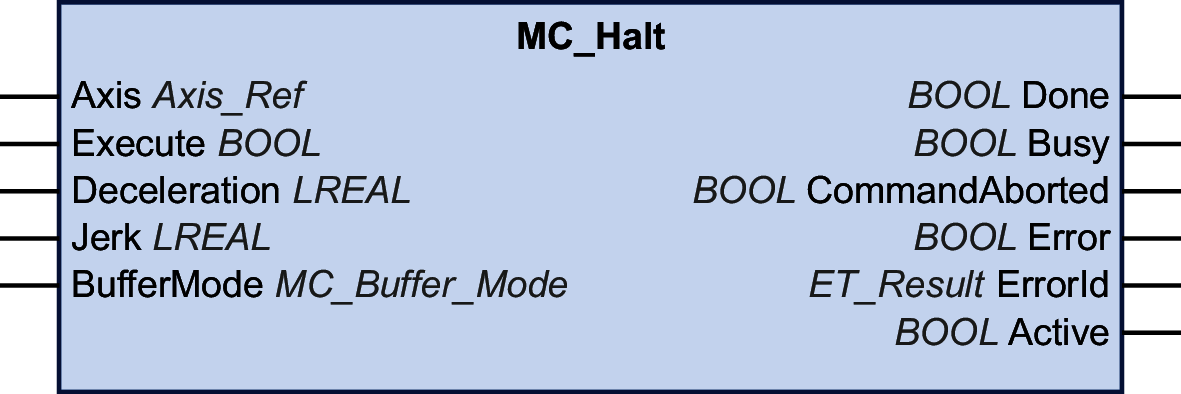
Entradas
|
Entrada |
Tipo de datos |
Descripción |
|---|---|---|
|
Axis |
Axis_Ref |
Referencia al eje para el que se ejecutará el bloque de funciones. |
|
Execute |
BOOL |
Rango de valores: FALSE, TRUE. Valor predeterminado: FALSE. Un flanco ascendente de la entrada Execute inicia el bloque de funciones. El bloque de funciones continúa ejecutándose, y la salida Busy se establece en TRUE. Este bloque de funciones puede reiniciarse mientras se ejecuta. Los valores de destino se sobrescriben con los nuevos valores en el momento en que se produce el flanco ascendente. |
|
Deceleration |
LREAL |
Rango de valores: Un valor LREAL positivo Valor predeterminado: 0 Deceleración en unidades definidas por el usuario. |
|
Jerk |
LREAL |
Rango de valores: Un valor LREAL positivo y cero
Valor predeterminado: 0 |
|
BufferMode |
Valor predeterminado: Aborting Modalidad de búfer. Valores posibles:
Consulte MC_Buffer_Mode para obtener una descripción de los valores. |
Salidas
|
Salida |
Tipo de datos |
Descripción |
|---|---|---|
|
Done |
BOOL |
Rango de valores: FALSE, TRUE. Valor predeterminado: FALSE.
|
|
Busy |
BOOL |
Rango de valores: FALSE, TRUE. Valor predeterminado: FALSE.
|
|
CommandAborted |
BOOL |
Rango de valores: FALSE, TRUE. Valor predeterminado: FALSE.
|
|
Error |
BOOL |
Rango de valores: FALSE, TRUE. Valor predeterminado: FALSE.
|
|
ErrorID |
Esta enumeración incluye información de diagnóstico. |
|
|
Active |
BOOL |
Rango de valores: FALSE, TRUE. Valor predeterminado: FALSE.
|