Calibration
Remove Lower Arms and Rotational Axis
| Option | Procedure |
|---|---|
|
|
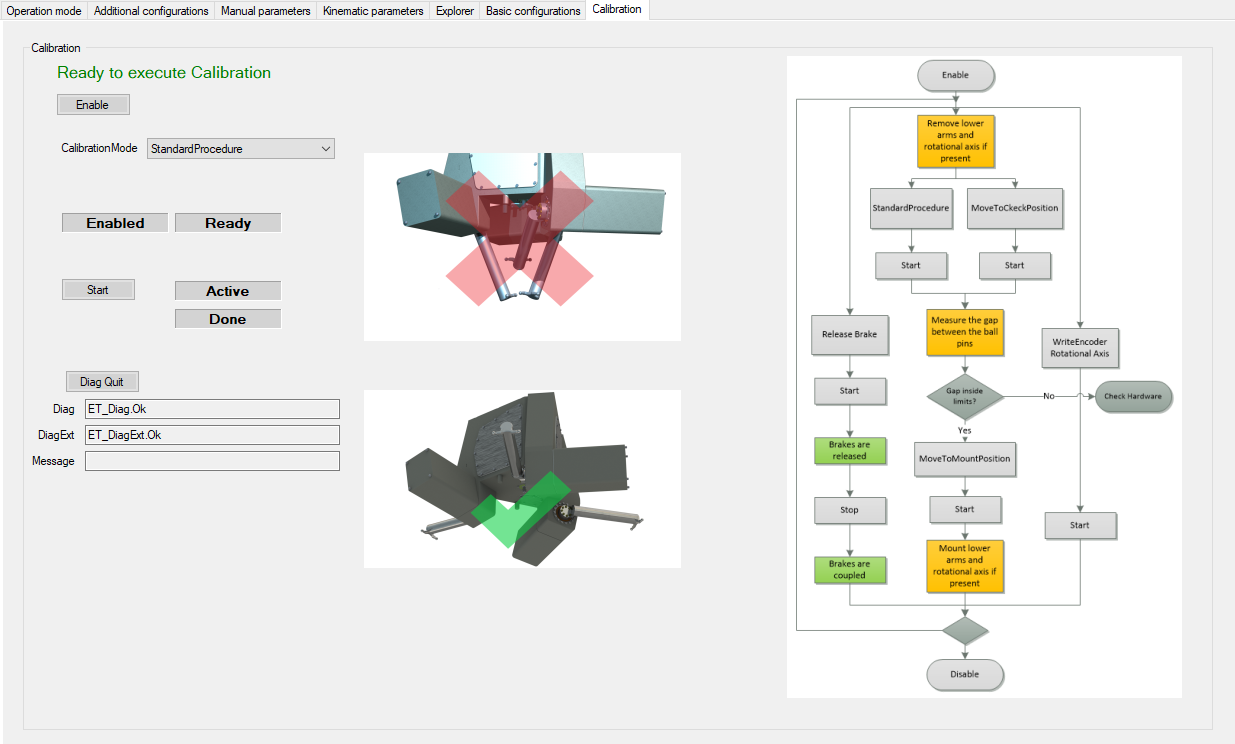
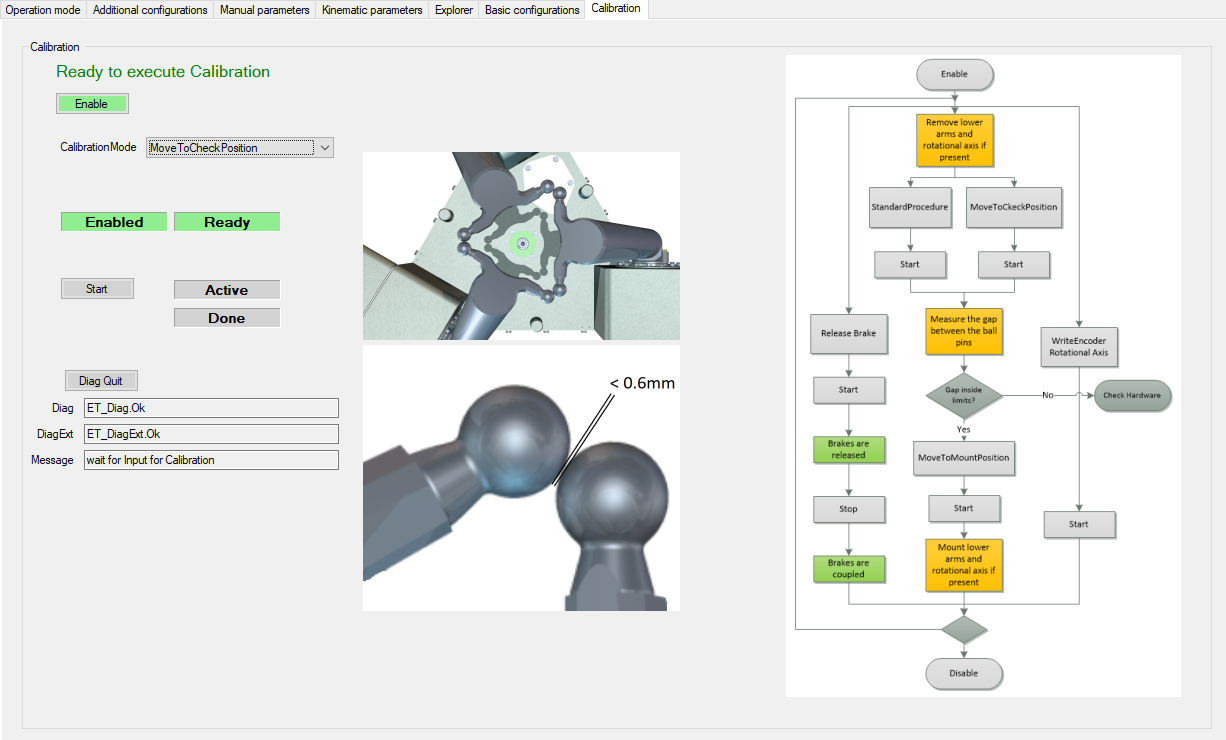
NOTE: Before starting the Standard procedure move the robot to the specified position (green checkmark).
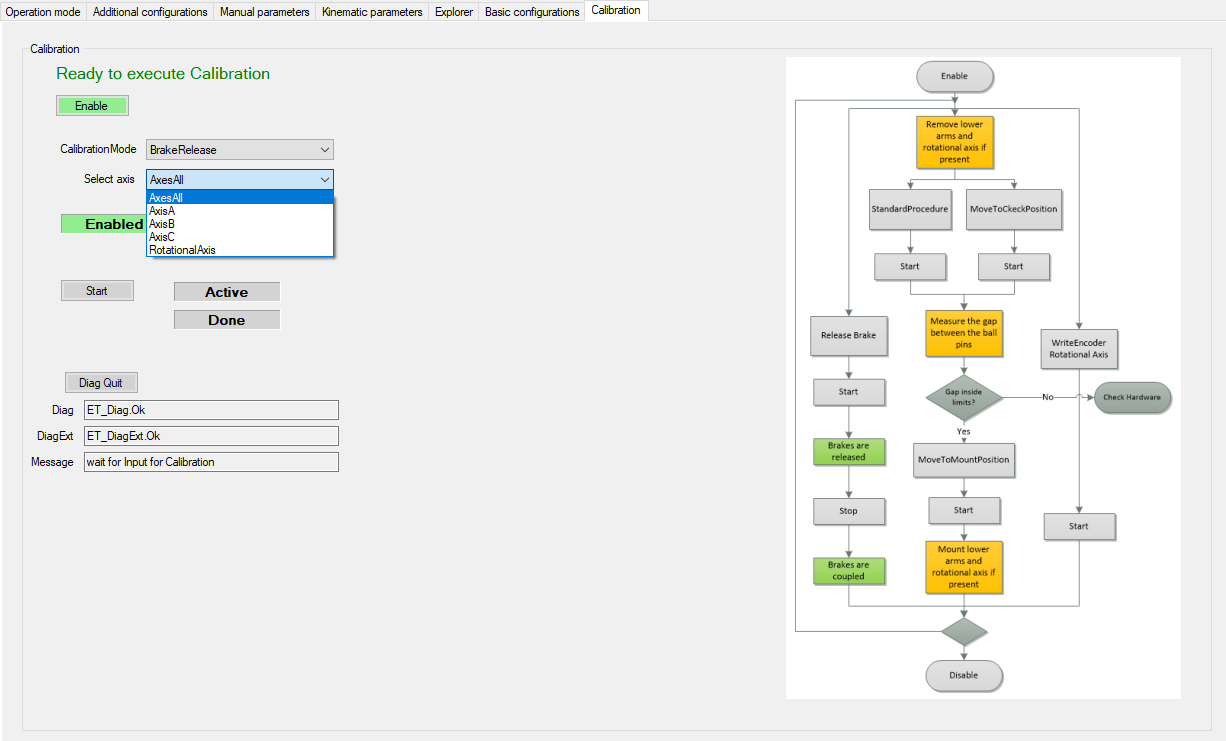
Select: 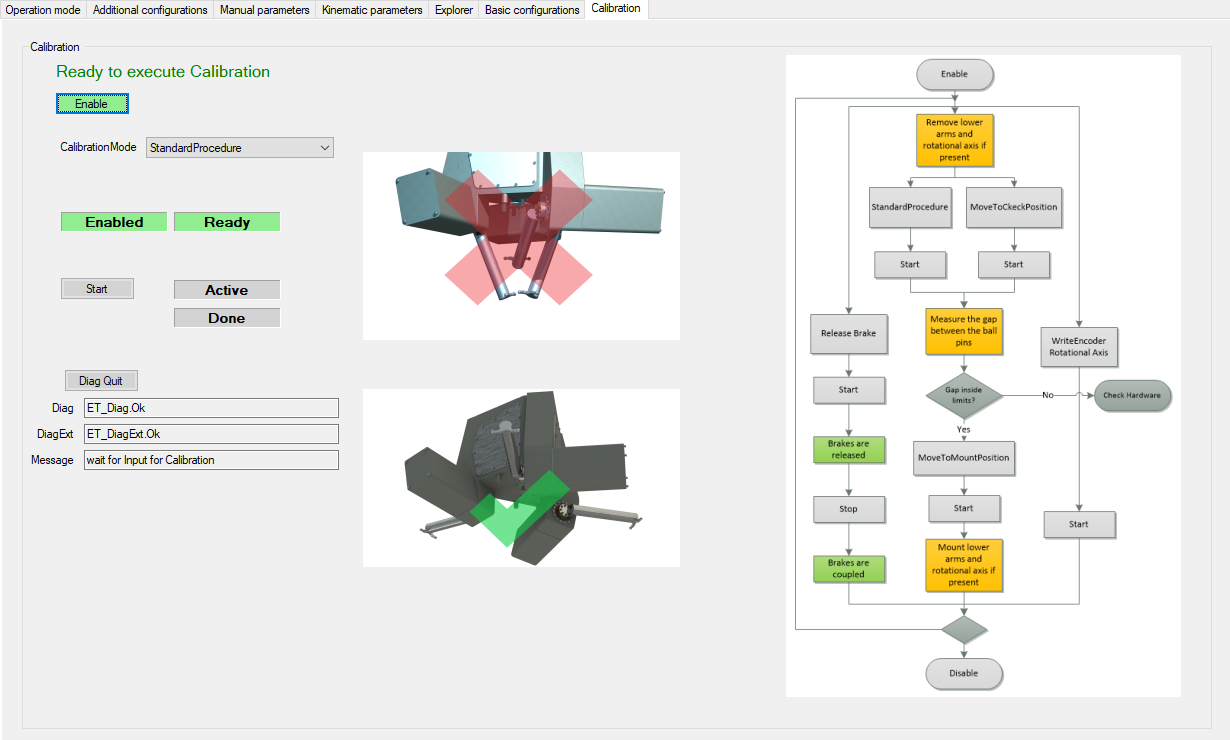
|
|
|
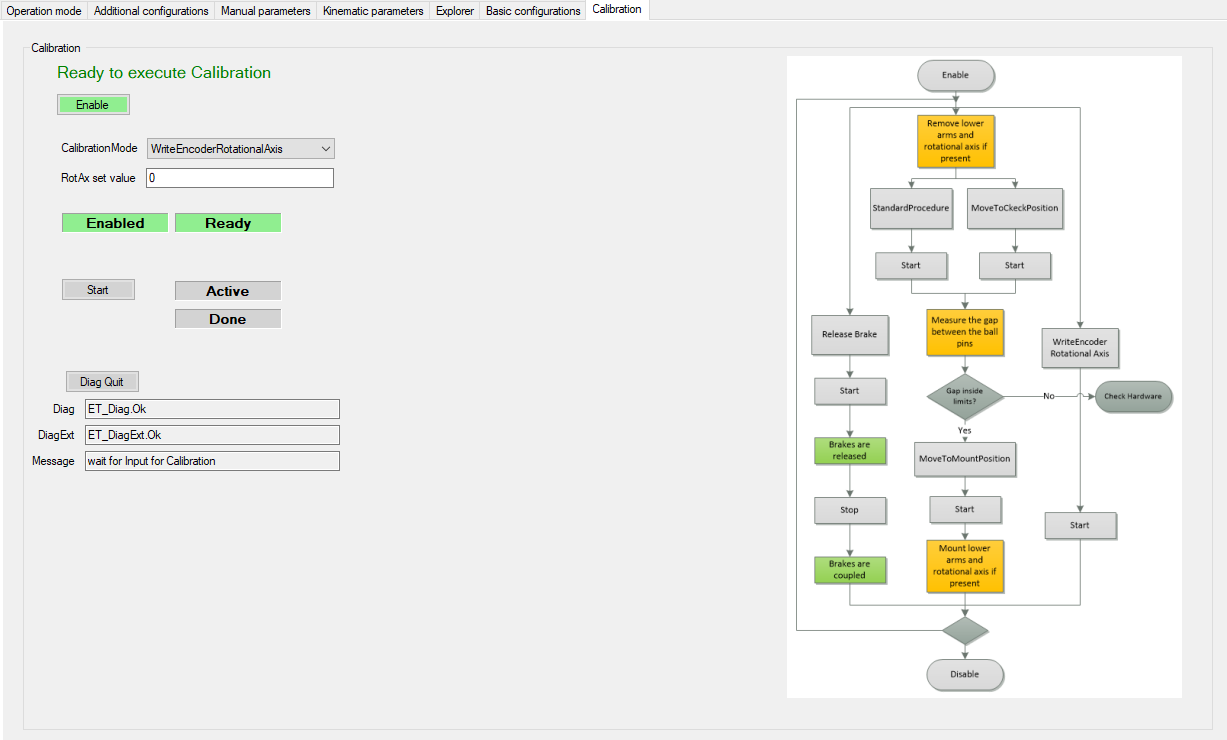
Select:
|
|
|
Select: 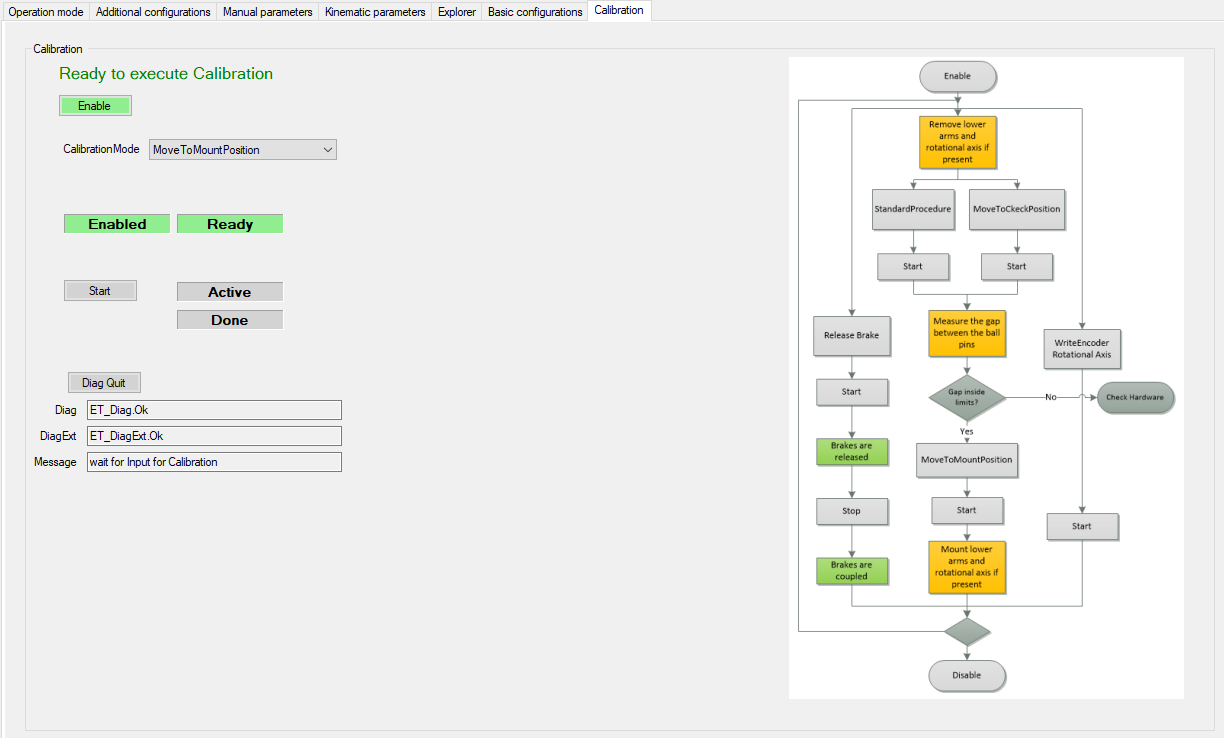
|
| Option | Procedure |
|---|---|
|
|
NOTE: Before starting the Standard procedure move the robot to the specified position (green checkmark).
Select:
|
|
|
Select:
|
|
|
Select:
|