FB_CollisionHandlerDelta2Ax - General Information
Overview
|
Type: |
Function block |
|
Available as of: |
V1.0.0.0 |
|
Inherits from: |
- |
|
Implements: |
IF_CollisionHandlerDelta2Ax |
|
Versions: |
Current version |
This chapter provides information on:
Description
Implements the collision handler of a Delta2Ax robot.
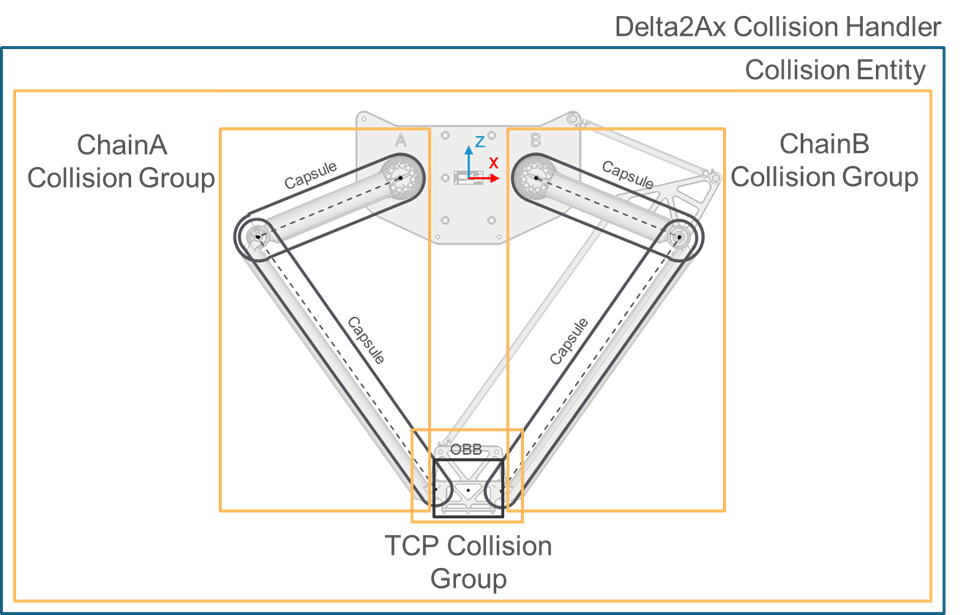
Using this collision handler, starting from a set of parameters it is possible to automatically configure a collision entity representing the structure of a Delta2Ax robot. Then, it is possible to update the collision entity based on the joint positions or the TCP position of the robot.
Extends: FB_CollisionHandlerRobot
The following graphic presents the collision entity configuration for a Delta2Ax collision handler:
Properties
|
Name |
Data type |
Accessing |
Description |
|---|---|---|---|
|
xEnableTCPCollisionGroup |
BOOL |
Get, Set |
If TRUE, the collision group representing the TCP is enabled; if FALSE, the collision group is disabled.
NOTE: A disabled collision group is ignored by the collision and distance queries.
|
|
raxEnableChainCollisionGroup |
REFERENCE TO ARRAY [1...Gc_udiDelta2AxNumberOfJoints] OF BOOL |
Get, Set |
Each element of this property allows to enable (TRUE value) or disable (FALSE value) a collision group linked to one of the chains of the robot. It is possible to use the elements of ET_Delta2AxCollisionGroupIndex to index the desired collision group.
NOTE: A disabled collision group is ignored by the collision and distance queries.
|
|
xUpdated |
BOOL |
Get |
The property is set to TRUE if the latest call of the Update method was successful; FALSE otherwise.
NOTE: This property should have a TRUE value before using the function block with any of the collision or distance query functions.
|
|
xConfigured |
BOOL |
Get |
TRUE if the function block is configured, FALSE otherwise. |
|
ifCollisionEntity |
Get |
Reference to the collision entity configured and updated by the collision handler.
NOTE:
|
|
|
rstBasePosition |
REFERENCE TO SE_Math.ST_Vector3D |
Get |
Position of the entity with reference to a global coordinate system. |
|
etType |
Get |
The type of the collision handler; this is related to the type of represented module. |