ST_DeltaChainDirectKinematicsData – General Information
Description
Contains the results of the direct kinematics performed on a single chain of a Delta robot structure.
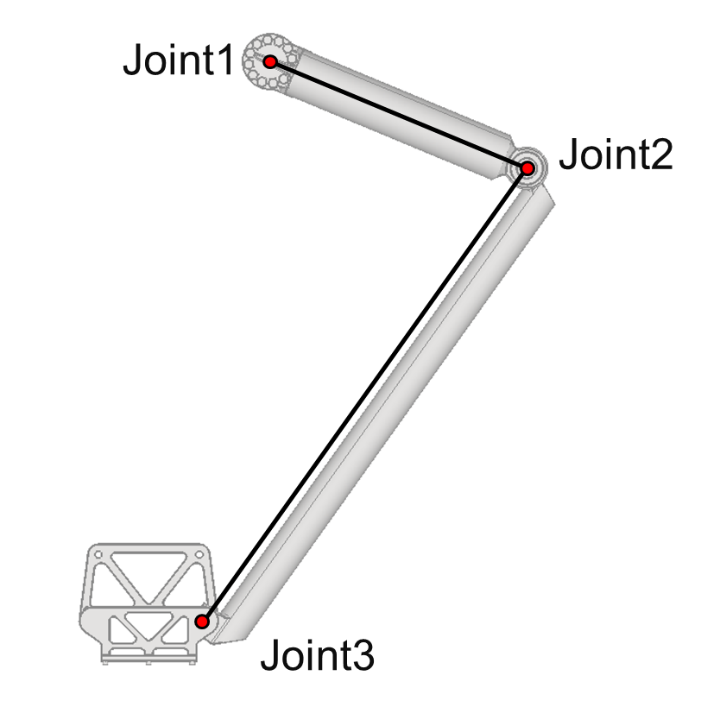
The following figure represents Joint1, Joint2 and Joint3 positions for a chain of a Delta3Ax robot:

The following figure represents the Joint1, Joint2 and Joint3 positions for a chain of a Delta2Ax robot.