Using FC_DistanceQuery
Overview
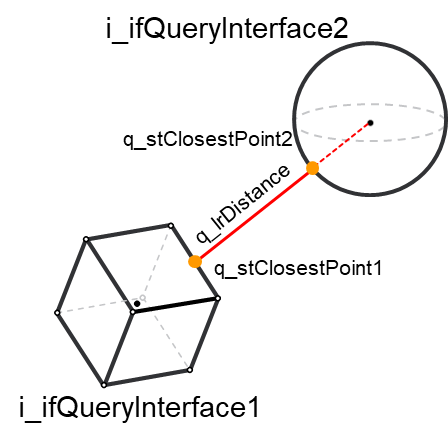
It is possible to perform a distance query by calling the function FC_DistanceQuery. The function expects two objects implementing the interface COD.IF_CollisionQueryInterface.
Collision objects, groups and entities are valid implementations of the IF_CollisionQueryInterface, meaning that you may provide any combination of them as inputs for the function.
There is a third input called i_xEvaluateClosestPoints that, if set to TRUE, forces the function to evaluate the closest points between the inputs.
The following list of minimum steps is required to perform a distance query:
|
Step |
Action |
|---|---|
|
1 |
Define a first collision object, group or entity and make sure it has xConfigured = TRUE in the case of an object, or xUpdated = TRUE in the case of a group or an entity. |
|
2 |
Define a second collision object, group or entity and make sure it has xConfigured = TRUE in the case of an object, or xUpdated = TRUE in the case of a group or an entity. |
|
3 |
Provide these objects as inputs of the FC_DistanceQuery function |
On a successful call of FC_DistanceQuery, the function will return information about the distance between the two inputs.
Distance query between two collision objects:
Example
Example in the case of two collision objects:
//configure the first object that is an OBB
fbOBB.SetCenterHalfExtentsOrientation(
i_stCenter := stOBBCenter,
i_stHalfExtents := stOBBHalfExtents,
i_stOrientation := stOBBOrientation,
q_xError=> xError,
q_etResult=> etResult,
q_sResultMsg=> sResultMsg
);
//check diagnostics here
IF xError THEN
//do something to handle the error
…
END_IF
//configure the second object that is a Sphere
fbSphere.SetCenterRadius(
i_stCenter := stSphereCenter,
i_lrRadius := lrSphereRadius
q_xError=> xError,
q_etResult=> etResult,
q_sResultMsg=> sResultMsg
);
//check diagnostics here
IF xError THEN
//do something to handle the error
…
END_IF
//now that both the objects are configured, it is possible to perform a distance query
COD.FC_DistanceQuery(
i_ifQueryInterface1:= fbOBB,
i_ifQueryInterface2:= fbSphere,
i_xEvaluateClosestPoints:= TRUE,
q_xError=> xError,
q_etResult=> etResult,
q_sResultMsg=> sResultMsg,
q_xCollision=> xCollision,
q_lrDistance=> lrDistance,
q_stClosestPoint1=> stClosestPoint1,
q_stClosestPoint2=> stClosestPoint2
);