OpMode Diagrams
General
White States are transition states.
For example, during the execution of a command already sent.
Dependent on the execution time, it can be possible that these states do not appear in the monitoring.
Gray States are final states.
For example, a sent command is executed successfully.
The module is waiting for a next command to be sent.
General OpMode diagram
Specific OpMode diagrams
OpMode BrakeRelease
White States are transition states.
For example, a sent command is being executed.
Dependent on the execution time, it can be possible that these states do not appear in the monitoring.
Gray States are final states.
For example, a sent command is executed successfully.
The module is waiting for a next command to be sent.
NOTE: The command ET_Cmd.Abort can be sent at any time and in every state.
ET_Cmd.Abort leads to the state ET_State.BrakeExit.
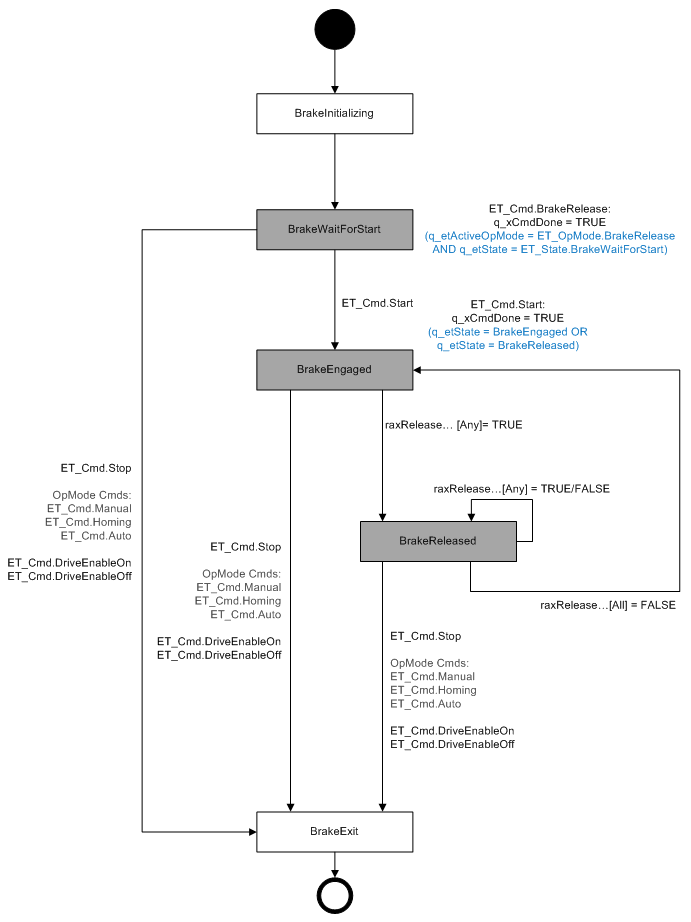
Stop behavior
The commands with the target state ET_State.BrakeExit engages the released brakes.
OpMode Homing
White States are transition states.
For example, a sent command is being executed.
Dependent on the execution time, it can be possible that these states do not appear in the monitoring.
Gray States are final states.
For example, a sent command is executed successfully.
The module is waiting for a next command to be sent.
NOTE: The command ET_Cmd.Abort can be sent at any time and in every state.
ET_Cmd.Abort leads to the state ET_State.HomingExit.
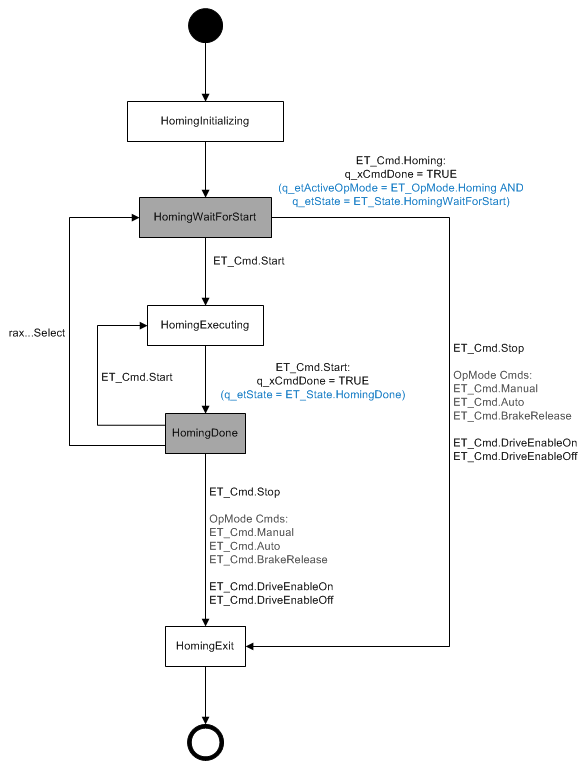
Stop behavior
ET_Cmd.Abort - An active homing motion is stopped with a ControllerStop.
All other commands with the target state ET_State.HomingExit can be send only if no homing is active.
OpMode Manual
White States are transition states.
For example, a sent command is being executed.
Dependent on the execution time, it can be possible that these states do not appear in the monitoring.
Gray States are final states.
For example, a sent command is executed successfully.
The module is waiting for a next command to be sent.
NOTE: The command ET_Cmd.Abort can be sent at any time and in every state.
ET_Cmd.Abort leads to the state ET_State.ManualExit.
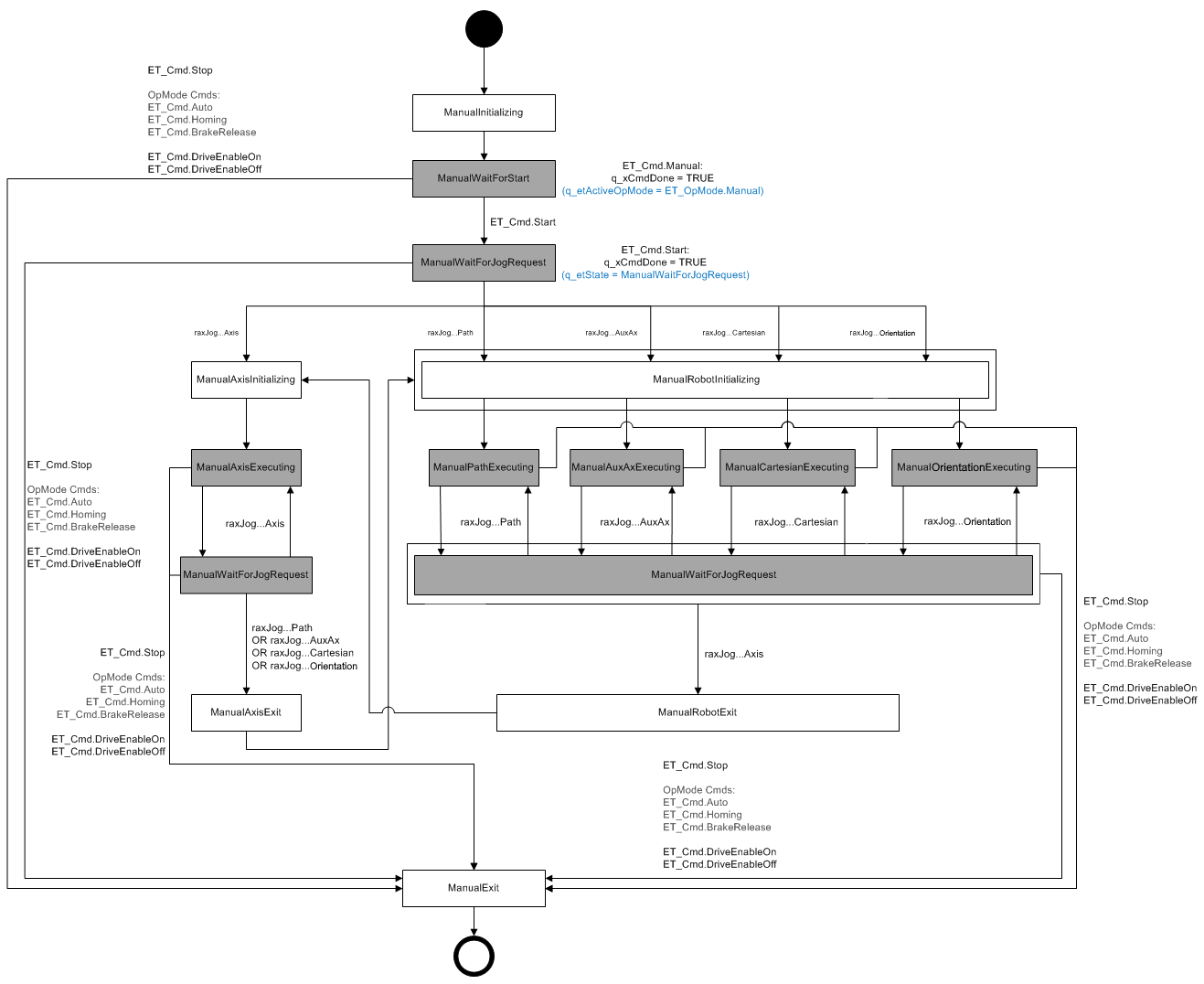
Stop behavior
ET_State.ManualAxisExecuting
Stop behavior in case of state ET_State.ManualAxisExecuting is active:
-
ET_Cmd.Stop - The active motion is stopped with the configured manual parameters for axes jogging.
-
Other commands with the target state ET_State.ManualExit lead to a ControllerStop of the active motion.
ET_State.ManualPathExecuting
Stop behavior in case of state ET_State.ManualPathExecuting is active:
-
ET_Cmd.Stop - The active motion is stopped with the configured manual parameters for path jogging set by IF_Manual.SetParameter for ROB.ET_RobotComponent.Path.
-
Other commands with the target state ET_State.ManualExit lead to a stop-on-path with the configured emergency stop parameters set by IF_Configuration.SetEmergencyParameter of the active motion.
ET_State.ManualAuxAxExecuting or ET_State.ManualCartesianExecuting or ET_State.ManualOrientationExecuting
Stop behavior in case of state ET_State.ManualAuxAxExecuting or ET_State.ManualCartesianExecuting or ET_State.ManualOrientationExecuting is active:
-
ET_Cmd.Stop - The active motion is stopped with the configured manual parameters for
-
AuxAx jogging set by IF_Manual.SetParameter for ROB.ET_RobotComponent.AuxAx1.
-
Cartesian jogging set by IF_Manual.SetParameter for ROB.ET_RobotComponent.CartesianX, -Y, -Z.
-
Orientation jogging set by IF_Manual.SetParameter for ROB.ET_RobotComponent.OrientationX, -Y, -Z.
-
-
Other commands with the target state ET_State.ManualExit lead to a stop with the configured emergency parameters set by IF_Configuration.SetEmergencyParameter of the active motion.
TPL.ET_Reaction.AsyncStop
Drives are disabled by the module. The configured ControllerEnableStopMode (drive parameter) is used for stopping.
TPL.ET_Reaction.SyncStopEL
The robot movement is stopped by using the emergency parameters set by:
-
IF_Configuration.SetEmergencyParameters(…)
-
IF_Configuration.SetEmergencyParameters2(…)
An active tracking is stopped with the parameter set by:
When the robot movement is stopped, the drives are disabled.
TPL.ET_Reaction.SyncStopEH
The robot movement is stopped by using the emergency parameters set by:
-
IF_Configuration.SetEmergencyParameters(…)
-
IF_Configuration.SetEmergencyParameters2(…)
An active tracking is stopped with the parameter set by:
When the robot movement is stopped, the drives are NOT disabled.
TPL.ET_Reaction.StopEndOfCycle
The robot movement is stopped by using the motion parameters set by:
-
IF_Manual.SetParameter(…)
-
IF_Manual.SetMaxDeceleration(…)
-
IF_Manual.SetRamp(…)
After the robot jogging movement has stopped, an active tracking is stopped with the parameter set by:
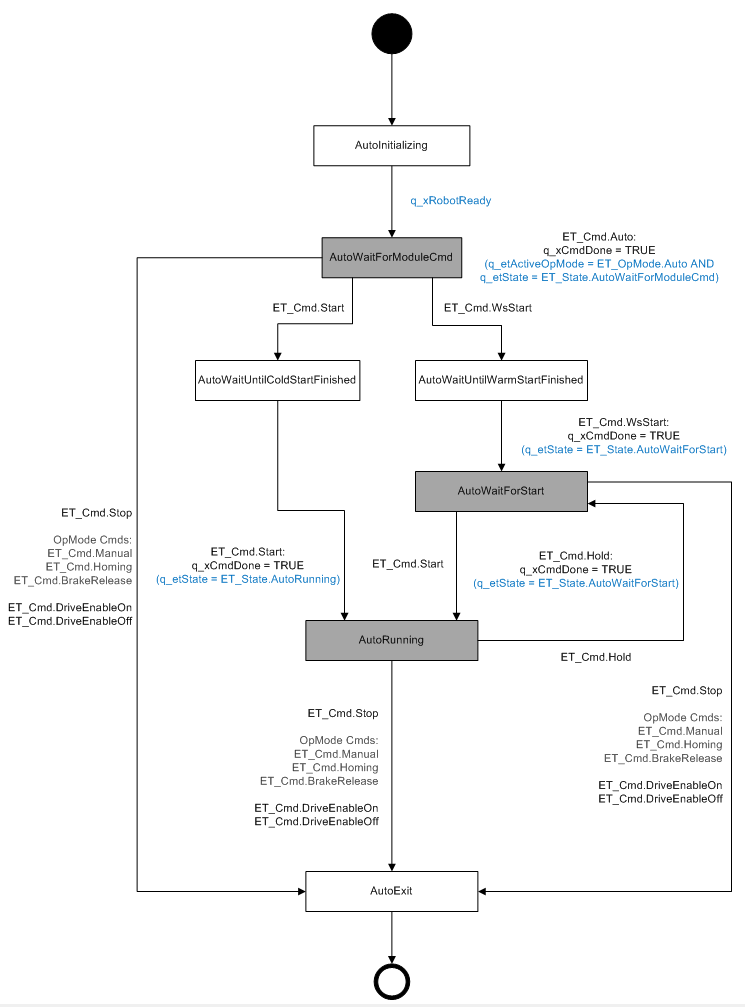
OpMode Auto
White States are transition states.
For example, a sent command is being executed.
Dependent on the execution time, it can be possible that these states do not appear in the monitoring.
Gray States are final states.
For example, a sent command is executed successfully.
The module is waiting for a next command to be sent.
NOTE: The command ET_Cmd.Abort can be sent at any time and in every state.
ET_Cmd.Abort leads to the state ET_State.AutoExit.
Stop behavior
ET_State.AutoRunning
Stop behavior in case of state ET_State.AutoRunning is active and the robot is in motion:
-
ET_Cmd.Hold - The active path motion is stopped on path with the configured motion parameters set by ROB.IF_RobotMotion.SetMotionParameter for ROB.ET_RobotComponent.Path.
-
ET_Cmd.Stop - The active path motion is stopped on path with the configured motion parameters set by ROB.IF_RobotMotion.SetMotionParameter for ROB.ET_RobotComponent.Path).
-
All other commands with the target state ET_State.AutoExit lead to a stop-on-path with the configured emergency parameters set by IF_Configuration.SetEmergencyParameter.
TPL.ET_Reaction.AsyncStop
Drives are disabled by the module. The configured ControllerEnableStopMode (drive parameter) is used for stopping.
TPL.ET_Reaction.SyncStopEL
The robot movement is stopped by using the emergency parameters set by:
-
IF_Configuration.SetEmergencyParameters(…)
-
IF_Configuration.SetEmergencyParameters2(…)
An active tracking is stopped with the parameter set by:
When the robot movement is stopped, the drives are disabled.
TPL.ET_Reaction.SyncStopEH
The robot movement is stopped by using the emergency parameters set by:
-
IF_Configuration.SetEmergencyParameters(…)
-
IF_Configuration.SetEmergencyParameters2(…)
An active tracking is stopped with the parameter set by:
When the robot movement is stopped, the drives are NOT disabled.
TPL.ET_Reaction.StopEndOfCycle
The robot path movement is stopped by using the motion parameters set by:
After the robot path movement has stopped, an active tracking is stopped with the parameter set by: