FB_OBB - General Information
Overview
|
Type: |
Function block |
|
Available as of: |
V1.0.0.0 |
|
Inherits from: |
- |
|
Implements: |
IF_OBB |
|
Extends: |
FB_CollisionObject |
|
Versions: |
Current version |
This chapter provides information on:
Description
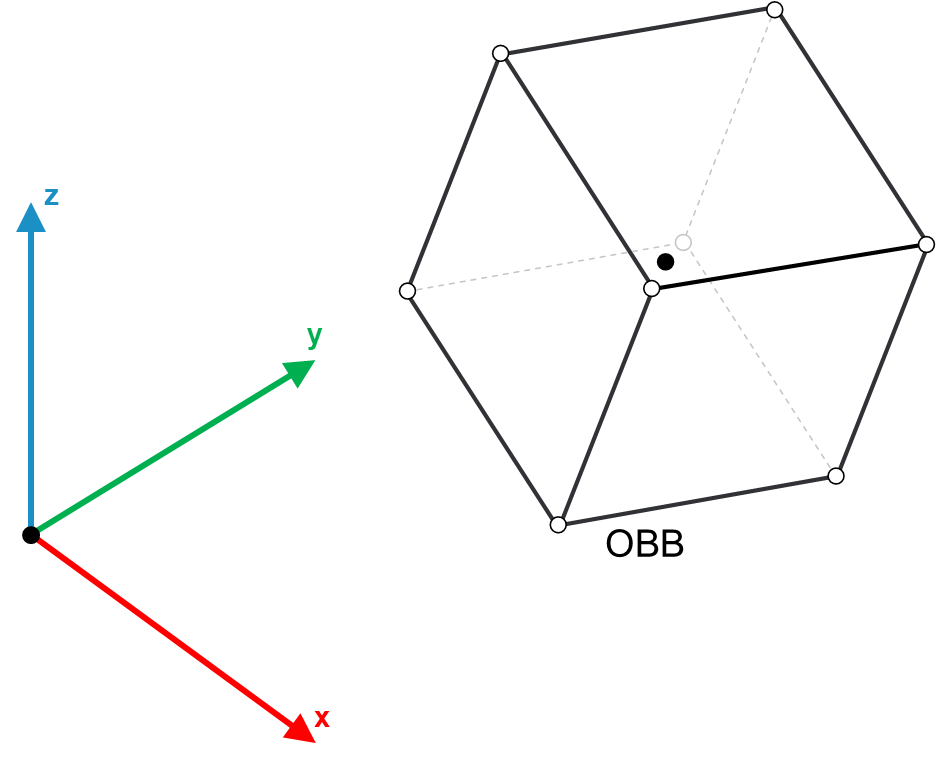
An OBB is a box that is defined by the position of its center, its half extents and its orientation.
The following figure is a representation of an OBB:
Properties
|
Name |
Data type |
Accessing |
Description |
|---|---|---|---|
|
rastVertices |
REFERENCE TO ARRAY [1...Gc_udiMaxNumberOfCollisionObjectVertices] OF SE_Math.ST_Vector3D |
Get |
List of vertices for the OBB object. |
|
rstCenter |
REFERENCE TO SE_Math.ST_Vector3D |
Get |
Center of the OBB object. |
|
rstHalfExtents |
REFERENCE TO SE_Math.ST_Vector3D |
Get |
Half extents of the OBB object along X, Y and Z. |
|
udiNumberOfVertices |
UDINT |
Get |
Number of vertices of an OBB object. |
|
rstOrientation |
REFERENCE TO SE_Math.ST_Matrix3D |
Get |
Orientation of the OBB object represented as rotation matrix. |
|
etType |
ET_CollisionObjectType |
Get |
This property describes the type of bounding volume implemented by the object. |
|
xConfigured |
BOOL |
Get |
The value of this property is TRUE if the object has been properly initialized, FALSE otherwise. |