Typical Cycle Time
Cycle Times of Robot VRKT1M0
The following measurements are performed at an ambient temperature of 20 °C (68 °F) with a PacDrive 3 and use the SchneiderElectricRobotics library.
|
Path Z1 x Y x Z2 in mm (in) |
Load(2) in kg (lb) |
Cycle time(1) in s |
Cycles per minute |
|---|---|---|---|
|
25 x 305 x 25 (1 x 12 x 1) |
0.1 (0.22) |
0.468 |
128 |
|
1.5 (3.3) |
0.512 |
117 |
|
|
3.0 (6.6) |
0.568 |
106 |
|
|
5.0 (11) |
0.580 |
103 |
|
|
10.0 (22) |
0.692 |
87 |
|
|
15.0 (33) |
0.764 |
79 |
|
|
70 x 400 x 70 (2.76 x 15.7 x 2.76) |
0.1 (0.22) |
0.532 |
113 |
|
1.5 (3.3) |
0.548 |
109 |
|
|
3.0 (6.6) |
0.608 |
99 |
|
|
5.0 (11) |
0.636 |
94 |
|
|
10.0 (22) |
0.748 |
80 |
|
|
15.0 (33) |
0.864 |
69 |
|
|
(1) Cycle times contain the back and forth motion. A position is considered as reached when the robot remains permanently in a window of +/-0.25 mm (0.0098 in) around the target position. (2) Loads up to 15 kg (33 lb). Heavier payloads upon request. If required, contact your local Schneider Electric service representative |
|||
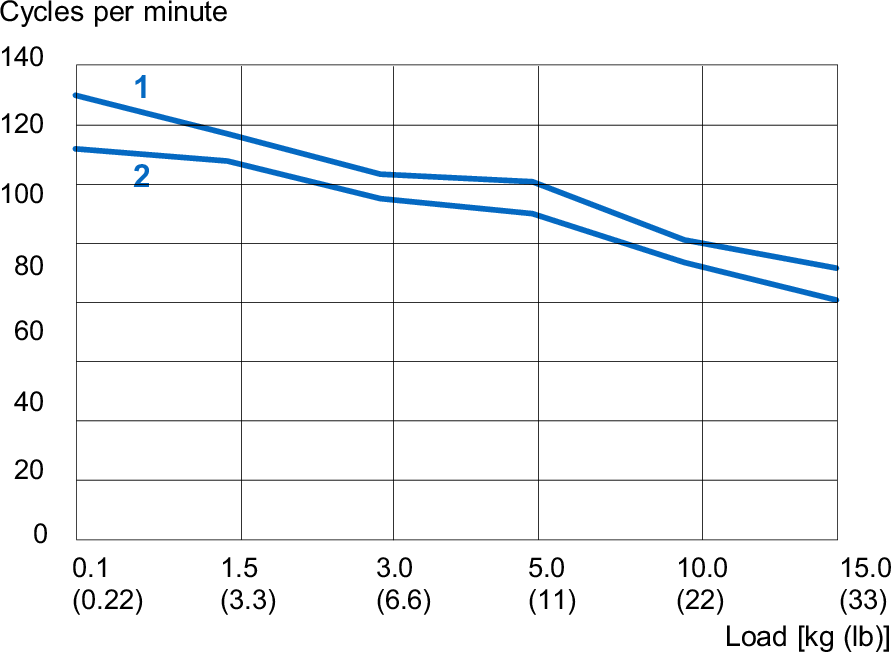
1 25 x 305 x 25 mm (1 x 12 x 1 in)
2 70 x 400 x 70 mm (2.76 x 15.7 x 2.76 in)
Cycle Times of Robot VRKT2M0 / VRKT2L0
The following measurements are performed at an ambient temperature of 20 °C (68 °F) with a PacDrive 3 and use the SchneiderElectricRobotics library.
|
Path Z1 x Y x Z2 in mm (in) |
Load(2) in kg (lb) |
Cycle time(1) in s |
Cycles per minute |
|---|---|---|---|
|
25 x 305 x 25 (1 x 12 x 1) |
0.1 (0.22) |
0.405 |
148 |
|
5.0 (11) |
0.462 |
130 |
|
|
10.0 (22) |
0.536 |
112 |
|
|
30.0 (66) |
0.759 |
79 |
|
|
40.0 (88) |
0.833 |
72 |
|
|
70 x 400 x 70 (2.76 x 15.7 x 2.76) |
0.1 (0.22) |
0.469 |
128 |
|
5.0 (11) |
0.526 |
114 |
|
|
10.0 (22) |
0.594 |
101 |
|
|
30.0 (66) |
0.833 |
72 |
|
|
40.0 (88) |
0.938 |
64 |
|
|
(1) Cycle times contain the back and forth motion. A position is considered as reached when the robot remains permanently in a window of +/-0.25 mm (0.0098 in) around the target position. (2) Loads up to 40 kg (88 lb). Heavier payloads upon request. If required, contact your local Schneider Electric service representative |
|||
1 25 x 305 x 25 mm (1 x 12 x 1 in)
2 70 x 400 x 70 mm (2.76 x 15.7 x 2.76 in)
Cycle Times of Robot VRKT2M1
The following measurements are performed at an ambient temperature of 20 °C (68 °F) with a PacDrive 3 and use the SchneiderElectricRobotics library.
|
Path Z1 x Y x Z2 in mm (in) |
Load(2) in kg (lb) |
Cycle time(1) in s |
Cycles per minute |
|---|---|---|---|
|
25 x 305 x 25 (1 x 12 x 1) |
0.1 (0.22) |
0.438 |
137 |
|
5.0 (11) |
0.500 |
120 |
|
|
10.0 (22) |
0.583 |
103 |
|
|
30.0 (66) |
0.779 |
77 |
|
|
45.0 (99) |
0.896 |
67 |
|
|
60.0 (132) |
1.034 |
58 |
|
|
70 x 400 x 70 (2.76 x 15.7 x 2.76) |
0.1 (0.22) |
0.484 |
124 |
|
5.0 (11) |
0.560 |
107 |
|
|
10.0 (22) |
0.680 |
93 |
|
|
30.0 (66) |
0.880 |
68 |
|
|
45.0 (99) |
1.060 |
57 |
|
|
60.0 (132) |
1.200 |
50 |
|
|
(1) Cycle times contain the back and forth motion. A position is considered as reached when the robot remains permanently in a window of +/-0.25 mm (0.0098 in) around the target position. (2) Loads up to 60 kg (132 lb). Heavier payloads upon request. If required, contact your local Schneider Electric service representative. |
|||
1 25 x 305 x 25 mm (1 x 12 x 1 in)
2 70 x 400 x 70 mm (2.76 x 15.7 x 2.76 in)
Cycle Times of Robot VRKT3M0 / VRKT3L0
The following measurements are performed at an ambient temperature of 20 °C (68 °F) with a PacDrive 3 and use the SchneiderElectricRobotics library.
|
Path Z1 x Y x Z2 in mm (in) |
Load(2) in kg (lb) |
Cycle time(1) in s |
Cycles per minute |
|---|---|---|---|
|
25 x 305 x 25 (1 x 12 x 1) |
0.1 (0.22) |
0.419 |
143 |
|
5.0 (11) |
0.478 |
126 |
|
|
10.0 (22) |
0.558 |
108 |
|
|
30.0 (66) |
0.778 |
77 |
|
|
70 x 400 x 70 (2.76 x 15.7 x 2.76) |
0.1 (0.22) |
0.479 |
125 |
|
5.0 (11) |
0.538 |
112 |
|
|
10.0 (22) |
0.619 |
97 |
|
|
30.0 (66) |
0.858 |
70 |
|
|
90 x 700 x 90 (3.54 x 27.6 x 3.54) |
0.1 (0.22) |
0.618 |
97 |
|
5.0 (11) |
0.698 |
86 |
|
|
10.0 (22) |
0.778 |
77 |
|
|
30.0 (66) |
1.158 |
52 |
|
|
(1) Cycle times contain the back and forth motion. A position is considered as reached when the robot remains permanently in a window of +/-0.25 mm (0.0098 in) around the target position. (2) Loads up to 35 kg (66 lb). Heavier payloads upon request. If required, contact your local Schneider Electric service representative. |
|||
1 25 x 305 x 25 mm (1 x 12 x 1 in)
2 90 x 700 x 90 mm (3.54 x 27.6 x 3.54 in)
Cycle Times of Robot VRKT3M1
The following measurements are performed at an ambient temperature of 20 °C (68 °F) with a PacDrive 3 and use the SchneiderElectricRobotics library.
|
Path Z1 x Y x Z2 in mm (in) |
Load(2) in kg (lb) |
Cycle time(1) in s |
Cycles per minute |
|---|---|---|---|
|
25 x 305 x 25 (1 x 12 x 1) |
0.1 (0.22) |
0.460 |
130 |
|
5.0 (11) |
0.519 |
116 |
|
|
10.0 (22) |
0.619 |
97 |
|
|
30.0 (66) |
0.818 |
73 |
|
|
50.0 (110) |
0.998 |
60 |
|
|
70 x 400 x 70 (2.76 x 15.7 x 2.76) |
0.1 (0.22) |
0.518 |
116 |
|
5.0 (11) |
0.578 |
104 |
|
|
10.0 (22) |
0.738 |
81 |
|
|
30.0 (66) |
0.979 |
61 |
|
|
50.0 (110) |
1.158 |
52 |
|
|
90 x 700 x 90 (3.54 x 27.6 x 3.54) |
0.1 (0.22) |
0.659 |
91 |
|
5.0 (11) |
0.758 |
79 |
|
|
10.0 (22) |
0.878 |
68 |
|
|
30.0 (66) |
1.178 |
51 |
|
|
50.0 (110) |
1.538 |
39 |
|
|
(1) Cycle times contain the back and forth motion. A position is considered as reached when the robot remains permanently in a window of +/-0.25 mm (0.0098 in) around the target position. (2) Loads up to 50 kg (110 lb). Heavier payloads upon request. If required, contact your local Schneider Electric service representative. |
|||
1 25 x 305 x 25 mm (1 x 12 x 1 in)
2 90 x 700 x 90 mm (3.54 x 27.6 x 3.54 in)
Cycle Times of Robot VRKT5M0 / VRKT5L0
The following measurements are performed at an ambient temperature of 20 °C (68 °F) with a PacDrive 3 and use the SchneiderElectricRobotics library.
|
Path Z1 x Y x Z2 in mm (in) |
Load(2) in kg (lb) |
Cycle time(1) in s |
Cycles per minute |
|---|---|---|---|
|
25 x 305 x 25 (1 x 12 x 1) |
0.1 (0.22) |
0.448 |
134 |
|
5.0 (11) |
0.541 |
111 |
|
|
10.0 (22) |
0.675 |
89 |
|
|
30.0 (66) |
1.077 |
56 |
|
|
70 x 400 x 70 (2.76 x 15.7 x 2.76) |
0.1 (0.22) |
0.555 |
108 |
|
5.0 (11) |
0.593 |
101 |
|
|
10.0 (22) |
0.862 |
70 |
|
|
30.0 (66) |
1.168 |
51 |
|
|
90 x 700 x 90 (3.54 x 27.6 x 3.54) |
0.1 (0.22) |
0.658 |
91 |
|
5.0 (11) |
0.798 |
75 |
|
|
10.0 (22) |
0.991 |
61 |
|
|
30.0 (66) |
1.828 |
33 |
|
|
110 x 1300 x 110 (4.3 x 51 x 4.3) |
0.1 (0.22) |
0.950 |
63 |
|
5.0 (11) |
1.076 |
56 |
|
|
10.0 (22) |
1.418 |
42 |
|
|
30.0 (66) |
2.275 |
26 |
|
|
(1) Cycle times contain the back and forth motion. A position is considered as reached when the robot remains permanently in a window of +/-0.25 mm (0.0098 in) around the target position. (2) Loads up to 30 kg (66 lb). Heavier payloads upon request. If required, contact your local Schneider Electric service representative. |
|||
1 25 x 305 x 25 mm (1 x 12 x 1 in)
2 110 x 1300 x 110 mm (4.3 x 51 x 4.3 in)
Cycle Times of Robot VRKT5M1
The following measurements are performed at an ambient temperature of 20 °C (68 °F) with a PacDrive 3 and use the SchneiderElectricRobotics library.
|
Path Z1 x Y x Z2 in mm (in) |
Load(2) in kg (lb) |
Cycle time(1) in s |
Cycles per minute |
|---|---|---|---|
|
25 x 305 x 25 (1 x 12 x 1) |
0.1 (0.22) |
0.501 |
120 |
|
5.0 (11) |
0.581 |
102 |
|
|
10.0 (22) |
0.752 |
80 |
|
|
30.0 (66) |
0.980 |
61 |
|
|
40.0 (88) |
1.102 |
54 |
|
|
70 x 400 x 70 (2.76 x 15.7 x 2.76) |
0.1 (0.22) |
0.594 |
101 |
|
5.0 (11) |
0.682 |
88 |
|
|
10.0 (22) |
0.998 |
60 |
|
|
30.0 (66) |
1.153 |
52 |
|
|
40.0 (88) |
1.253 |
48 |
|
|
90 x 700 x 90 (3.54 x 27.6 x 3.54) |
0.1 (0.22) |
0.751 |
80 |
|
5.0 (11) |
0.893 |
67 |
|
|
10.0 (22) |
1.092 |
55 |
|
|
30.0 (66) |
1.575 |
38 |
|
|
40.0 (88) |
1.875 |
32 |
|
|
110 x 1300 x 110 (4.3 x 51 x 4.3) |
0.1 (0.22) |
0.952 |
63 |
|
5.0 (11) |
1.157 |
52 |
|
|
10.0 (22) |
1.535 |
39 |
|
|
30.0 (66) |
2.504 |
24 |
|
|
40.0 (88) |
2.859 |
21 |
|
|
(1) Cycle times contain the back and forth motion. A position is considered as reached when the robot remains permanently in a window of +/-0.25 mm (0.0098 in) around the target position. (2) Loads up to 45 kg (88 lb). Heavier payloads upon request. If required, contact your local Schneider Electric service representative |
|||
1 25 x 305 x 25 mm (1 x 12 x 1 in)
2 110 x 1300 x 110 mm (4.3 x 51 x 4.3 in)