Control_ATV
Descrizione funzionale
Questo blocco funzione gestisce Controlword, Statusword, velocità di riferimento e direzione del movimento per l'azionamento.
Questo blocco funzione richiede un Adattamento dell'I/O Mapping.
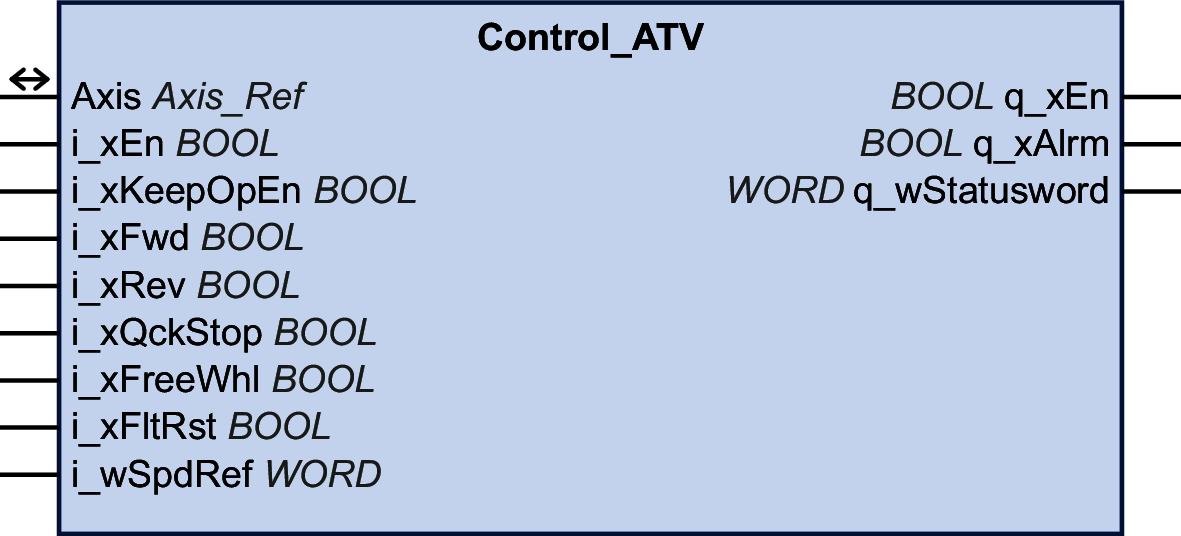
Ingressi
|
Ingresso |
Tipo di dati |
Descrizione |
|---|---|---|
|
i_xEn |
BOOL |
Campo valori: FALSE, TRUE. Valore predefinito: FALSE. Comando per l'attivazione o la disattivazione del blocco funzione.
|
|
i_xKeepOpEn |
BOOL |
Campo valori: FALSE, TRUE. Valore predefinito: FALSE.
|
|
i_xFwd |
BOOL |
Campo valori: FALSE, TRUE. Valore predefinito: FALSE.
|
|
i_xRev |
BOOL |
Campo valori: FALSE, TRUE. Valore predefinito: FALSE.
|
|
i_xQckStop |
BOOL |
Campo valori: FALSE, TRUE. Valore predefinito: FALSE.
|
|
i_xFreeWhl |
BOOL |
Campo valori: FALSE, TRUE. Valore predefinito: FALSE.
|
|
i_xFltRst |
BOOL |
Campo valori: FALSE, TRUE. Valore predefinito: FALSE.
Finché l'ingresso i_xFltRst è impostato a TRUE, gli ingressi i_xFwd e i_xRev non vengono presi in considerazione. |
|
i_wSpdRef |
WORD |
Campo valori: Valore predefinito: 0 Velocità di riferimento dell'azionamento. |
Uscite
|
Uscita |
Tipo di dati |
Descrizione |
|---|---|---|
|
q_xEn |
BOOL |
Campo valori: FALSE, TRUE. Valore predefinito: FALSE. Blocco funzione attivato/disattivato. Copia diretta da i_xEn. |
|
q_xAlrm |
BOOL |
Campo valori: FALSE, TRUE. Valore predefinito: FALSE. Impostato a FALSE quando il blocco funzione è disattivato e l'azionamento passa allo stato operativo "Switch On Disabled". Impostato a TRUE quando l'azionamento rileva un errore (bit 3 della parola di stato). |
|
q_wStatusword |
WORD |
Parola di stato dell'azionamento. |
Ingressi/uscite
|
Ingresso/uscita |
Tipo di dati |
Descrizione |
|---|---|---|
|
Axis |
Axis_Ref |
Riferimento all'asse (istanza) per cui deve essere eseguito il blocco funzione (corrisponde al nome dell'asse). Il nome dell'asse deve essere definito nella struttura EcoStruxure Machine Expert . |
Note
Se è stato attivato questo blocco funzione, l'uso simultaneo di altri blocchi funzione delle librerie GMC Independent PLCopen MC e GMC Independent ATV può provocare un comportamento anomalo.
| AVVERTIMENTO | |
|---|---|
Tenere presente quanto segue:
Dopo un "Quick Stop", lo stato operativo "Quick Stop Active" viene abbandonato automaticamente quando la velocità attuale e i valori di corrente attuali raggiungono il valore zero e se i comandi "Forward" e "Reverse" sono entrambi a FALSE. Per riavviare il movimento, disattivare Quick Stop (impostare i_xQckStop a TRUE).
Un "Quick Stop" ha una priorità più elevata rispetto a un arresto normale ("Forward" e "Reverse" impostati a FALSE).
Un "Free Wheel Stop" ha una priorità più elevata rispetto a un "Quick Stop".
Se l'azionamento visualizza il messaggio lampeggiante (COF) sul display a 7 segmenti dopo il download di un'applicazione nell'azionamento, sono necessari un fronte di salita e un fronte di discesa sull'ingresso "Fault Reset" (i_xFltRst) per riavviare la comunicazione con l'azionamento.
Adattamento della mappatura degli I/O (EtherNet/IP e Modbus/TCP)
Se si utilizza EtherNet/IP o Modbus/TCP, occorre regolare la mappatura degli I/O dell'azionamento per utilizzare questo blocco funzione.
L'assegnazione I/O dell'azionamento può essere adattata solo con il software di messa in servizio DTM. Per ulteriori informazioni sul DTM, vedere EcoStruxure Machine Expert - Device Type Manager (DTM) - Guida utente.
Per EtherNet/IP, la libreria utilizza i gruppi 100 e 101 e richiede la seguente mappatura:
-
Gruppo 100 (dal controller all'azionamento):
-
Prima parola: CMD, indirizzo logico 8501 (impostazione di fabbrica)
-
Seconda parola: LFRD, indirizzo logico 8602 (impostazione di fabbrica)
-
-
Gruppo 101 (da azionamento a controller):
-
Prima parola: ETA, indirizzo logico 3201 (impostazione di fabbrica)
-
Seconda parola: RFRD, indirizzo logico 8604 (impostazione di fabbrica)
-
Terza parola: LCR, indirizzo logico 3204 (da aggiungere alla mappatura)
-
Per Modbus/TCP, la libreria utilizza il servizio di scansione degli I/O e richiede la seguente mappatura:
-
Impostazione uscita scanner I/O (da controller ad azionamento):
-
Uscita 1: CMD, indirizzo logico 8501 (impostazione di fabbrica)
-
Uscita 2: LFRD, indirizzo logico 8602 (impostazione di fabbrica)
-
-
Impostazione ingresso scanner I/O (da azionamento a controller):
-
Ingresso 1: ETA, indirizzo logico 3201 (impostazione di fabbrica)
-
Ingresso 2: RFRD, indirizzo logico 8604 (impostazione di fabbrica)
-
Ingresso 3: LCR, indirizzo logico 3204 (da aggiungere alla mappatura)
-
Uso del blocco funzione
Avvio del blocco funzione con le impostazioni predefinite:
|
Passo |
Azione |
|---|---|
|
1 |
Disattivare "Free Wheel": Impostare i_xFreeWhl a TRUE. |
|
2 |
Disattivare "Quick Stop": Impostare i_xQckStop a TRUE. |
|
3 |
Attivare il blocco funzione: Impostare i_xEn a TRUE. |
|
4 |
Impostare una velocità di riferimento: Impostare i_wSpdRef a un valore diverso da zero. |
|
5 |
Avviare un movimento in direzione positiva ("Forward") o negativa ("Reverse"): Impostare i_xFwd o i_xRev a TRUE. |
Visualizzazione
Visualizzazione del blocco funzione Control_ATV:
Per ulteriori informazioni sulla visualizzazione di un blocco funzione, vedere .
Con la configurazione minima indicata sopra, la visualizzazione del blocco funzione può essere utilizzata per controllare l'azionamento. Dopo l'I/O mapping dei 5 dati specificati sopra, l'azionamento può essere avviato con la seguente sequenza di passi:
|
Passo |
Azione |
|---|---|
|
1 |
Fare clic sul pulsante per attivare il blocco funzione. |
|
2 |
Fare clic sul pulsante per disattivare "Quick Stop". |
|
3 |
Fare clic sul pulsante per disattivare "Free Wheel". |
|
4 |
Immettere un valore di velocità diverso da zero in giri al minuto (nel campo accanto al pulsante ). |
|
5 |
Fare clic sul pulsante . |
|
6 |
Verificare che il pulsante non sia attivato. |
|
7 |
Fare clic sul pulsante o : Il motore esegue un movimento in direzione positiva o negativa. |