Generate Targets
Generate Targets Tab
The Sensor Module also provides the feature to generate randomly generated targets for test purposes of Robot motion logic.
Based on the FB_RandomTargetsGenerator, you can create products or targets. Instead of configuring or programming the FB_RandomTargetsGenerator, you can create random targets using the Smart Template user interface.
For more information, refer to FB_RandomTargetsGenerator in the SchneiderElectricRobotics Toolbox Library Guide Online Help.
-
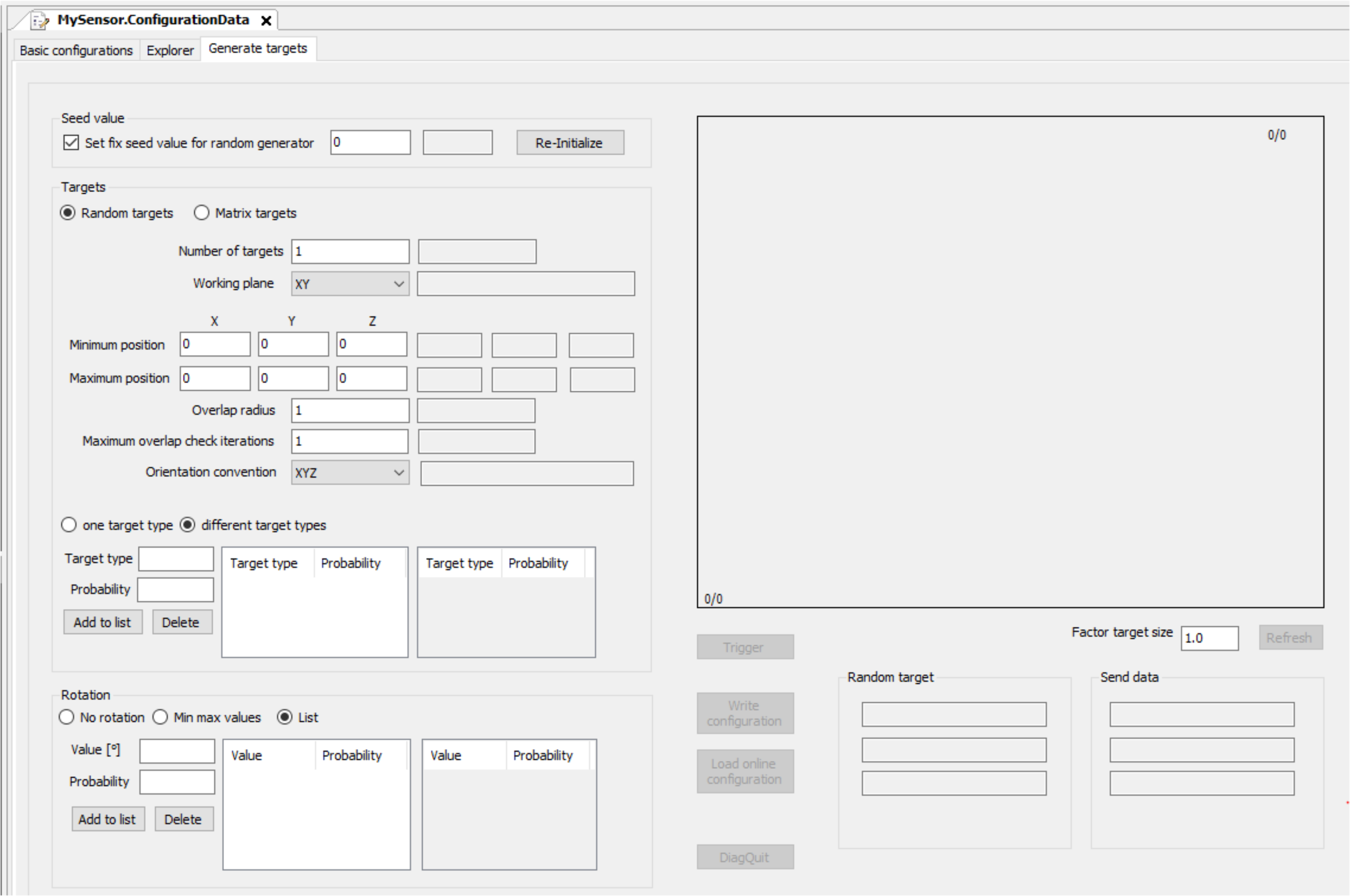
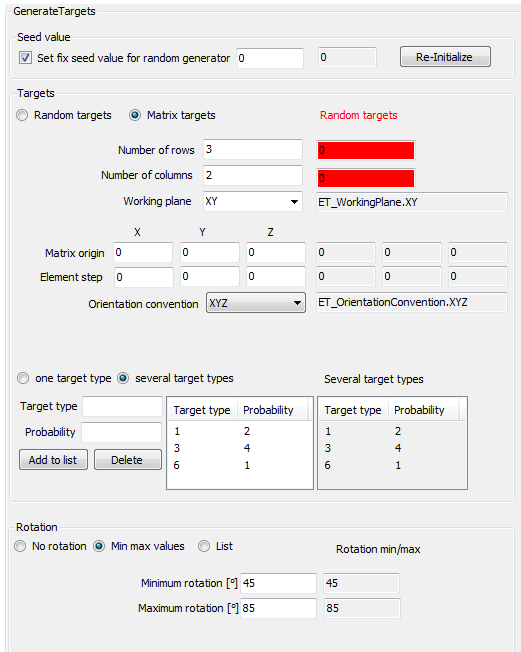
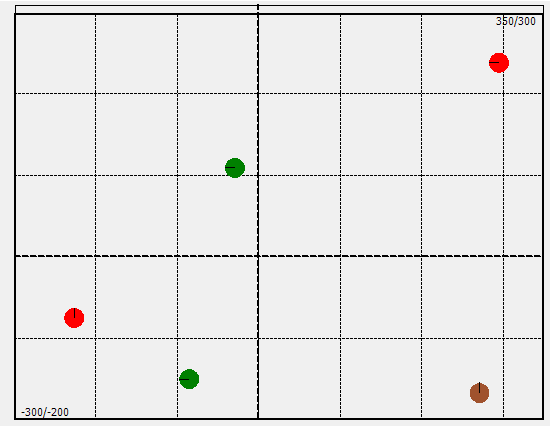
The left-hand side (white background color) displays the user-defined configuration.
-
The right-hand side (gray background color) displays the present online values used for the generation of the targets.
Seed Value

|
Element |
Description |
|---|---|
|
check box |
|
|
button |
Click the button to reinitialize the random generator with the given seed value and restart the present random sequence. |
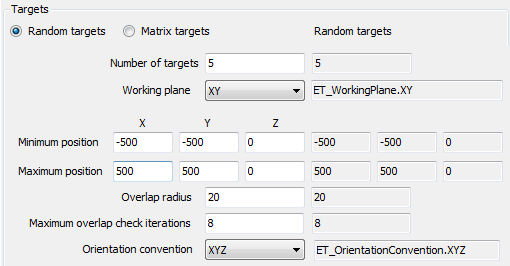
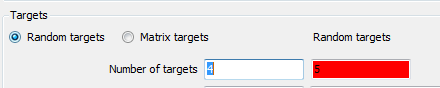
Random Targets
|
Element |
Description |
|---|---|
|
|
Number of targets to be generated after a trigger event. |
|
|
Select a working plane, for example, , , (the position along the third axis is set to 0), and, as a consequence, a rotation about a vector normal to the plane. |
|
|
Minimum position value for the generated target. |
|
|
Maximum position value for the generated target. |
|
|
Radius of a circle defined around each target. The targets are generated so that the circles do not overlap. |
|
|
Maximum attempts to generate targets. After this number of iterations, an error message is generated. |
|
|
Convention for the rotation angles of the orientation. |
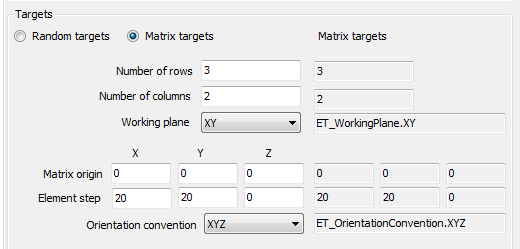
Matrix Targets
|
Element |
Description |
|---|---|
|
|
Number of rows of the matrix of targets. |
|
|
Number of columns of the matrix of targets. |
|
|
Select a working plane, for example, , , (the position along the third axis is set to 0), and, as a consequence, a rotation about a vector normal to the plane. |
|
|
Position of the matrix origin. The targets are generated starting from this position. It must be contained in the selected working plane. |
|
|
Position steps, along the X, Y and Z axes, used for the generation of the positions in the matrix. The value provided here must be compliant with the selected working plane. |
|
|
Convention for the rotation angles of the orientation. |
One Target Type

|
Element |
Description |
|---|---|
|
|
Only one target type is used. In this case, target type 1 is used. |
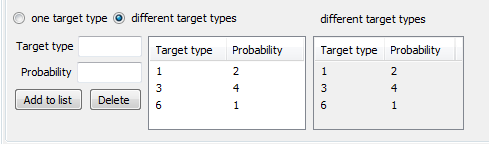
Different Target Types
|
Element |
Description |
|---|---|
|
|
Several target types are used. |
|
|
Sets the target type. Range: 1...10. |
|
|
Probability for the target type to be generated. Example above:
|
|
|
Adds a selected target type/probability pair to the list. |
|
|
Removes a selected target type/probability pair from the list. |
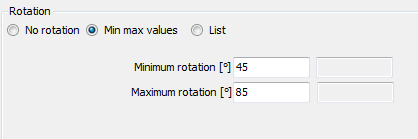
Rotation - Min Max Values
|
Element |
Description |
|---|---|
|
|
Minimum and maximum values for the rotation. The generated rotation values are randomly within this range. |
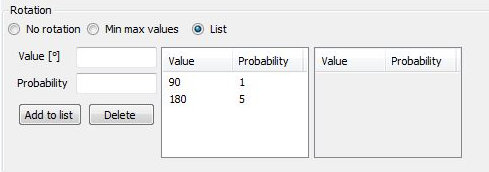
Rotation - List
|
Element |
Description |
|---|---|
|
|
List of up to 10 rotation value/probability pairs that a target type is randomly generated with. |
|
|
Rotation value. |
|
|
Probability for the target type to be generated. Example above:
|
|
|
Adds a selected rotation value/probability pair to the list. |
|
|
Removes a selected rotation value/probability pair from the list. |
Using the GUI (User Interface)
After entering a valid configuration, you can go online.
On the right-hand side (gray background color), the present values used on the logic motion controller are displayed.
The background is red if there are conflicts between the offline configuration parameters and the online values. If there are conflicts, you can choose if the online parameters are written to the offline parameter () or if the parameters are written to the online project ().
After entering a valid set of variables, being online and triggering ( button) a new target generation, the generated targets are displayed and sent.
The targets can be read with the methods GetHeader, GetProducts, and so on.
Displaying Generated Targets
The generated targets are displayed.
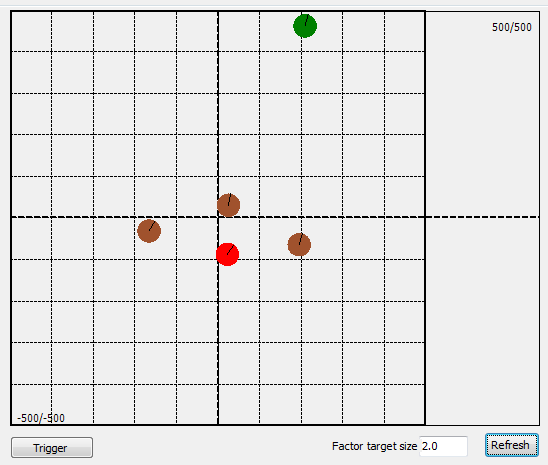
In case the displayed targets are not updated after a trigger event ( button), the display can be manually refreshed with the button.
Write Configuration / Load Online Configuration
If there is a conflict between the values you set (left side) and the values that run online on the controller, you can choose the values to be used for solving the conflict.
|
Element |
Description |
|---|---|
|
|
Write the offline parameters to the online (left to right). 
|
|
|
Load the values that run online on the controller to the offline parameters (right to left). 
|
Trigger Button
|
Element |
Description |
|---|---|
|
button |
Use this button to test the results of the present parameter set.
|
DiagQuit Button
|
Element |
Description |
|---|---|
|
button |
Use this button to acknowledge the diagnostic messages, for example in case of invalid configuration without switching to the call of SR_<MySensor>. |
Factor Target Size
The size of the displayed targets depends on the parameter Overlap radius or the parameter Element step.
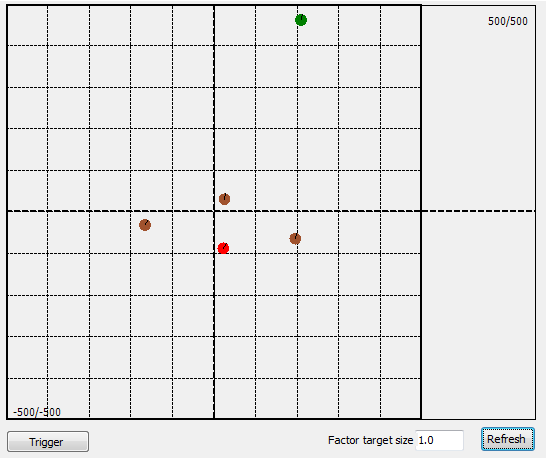
To scale the displayed targets, you can use and click the button.
State of the Generated Targets
The state / diagnostic of the internally used FB_RandomTargetsGenerator and FB_SendVisionData is displayed.
If the module is registered to the (SR_<MySensor>.RegisterLoggerPoint()), log messages are sent to the .