Add Robot Cartesian
Dialog Box
|
Step |
Action |
|---|---|
|
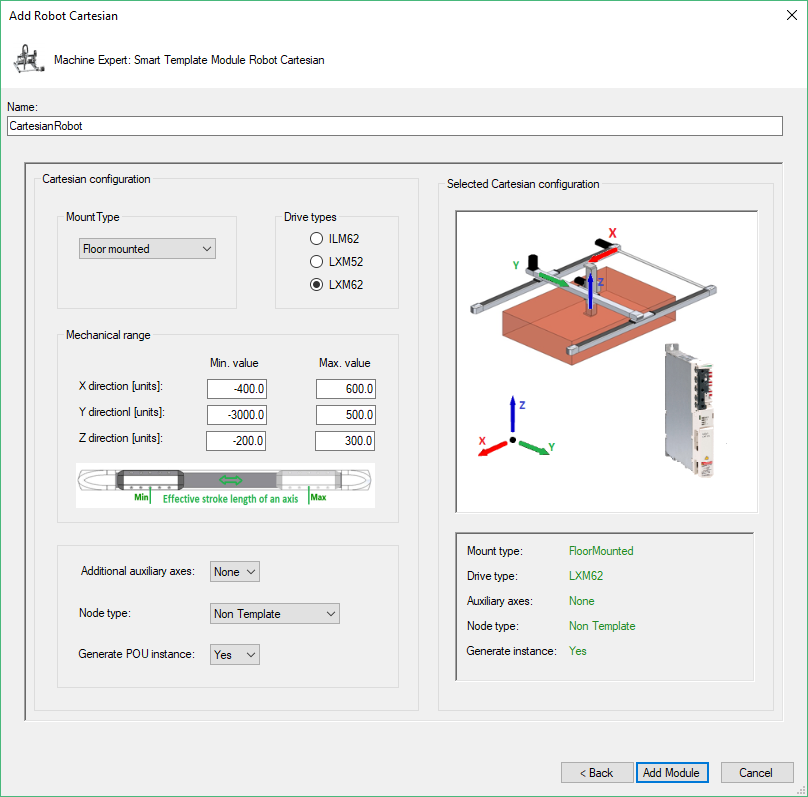
1 |
Enter a for the robot . The created object and the created drives use this name. |
|
2 |
Select the :
|
|
3 |
Select the :
|
|
4 |
Set the minimum and maximum values for movement parameters in the field. |
|
5 |
Select the value:
|
|
6 |
Select :
|
|
7 |
Verify the robot configuration that is displayed in . You cannot modify the configuration after leaving this dialog box. |
|
8 |
Confirm configuration by using the button to add the configured robot to your project. |