Additional Configurations
Overview
|
Item |
Description |
|---|---|
|
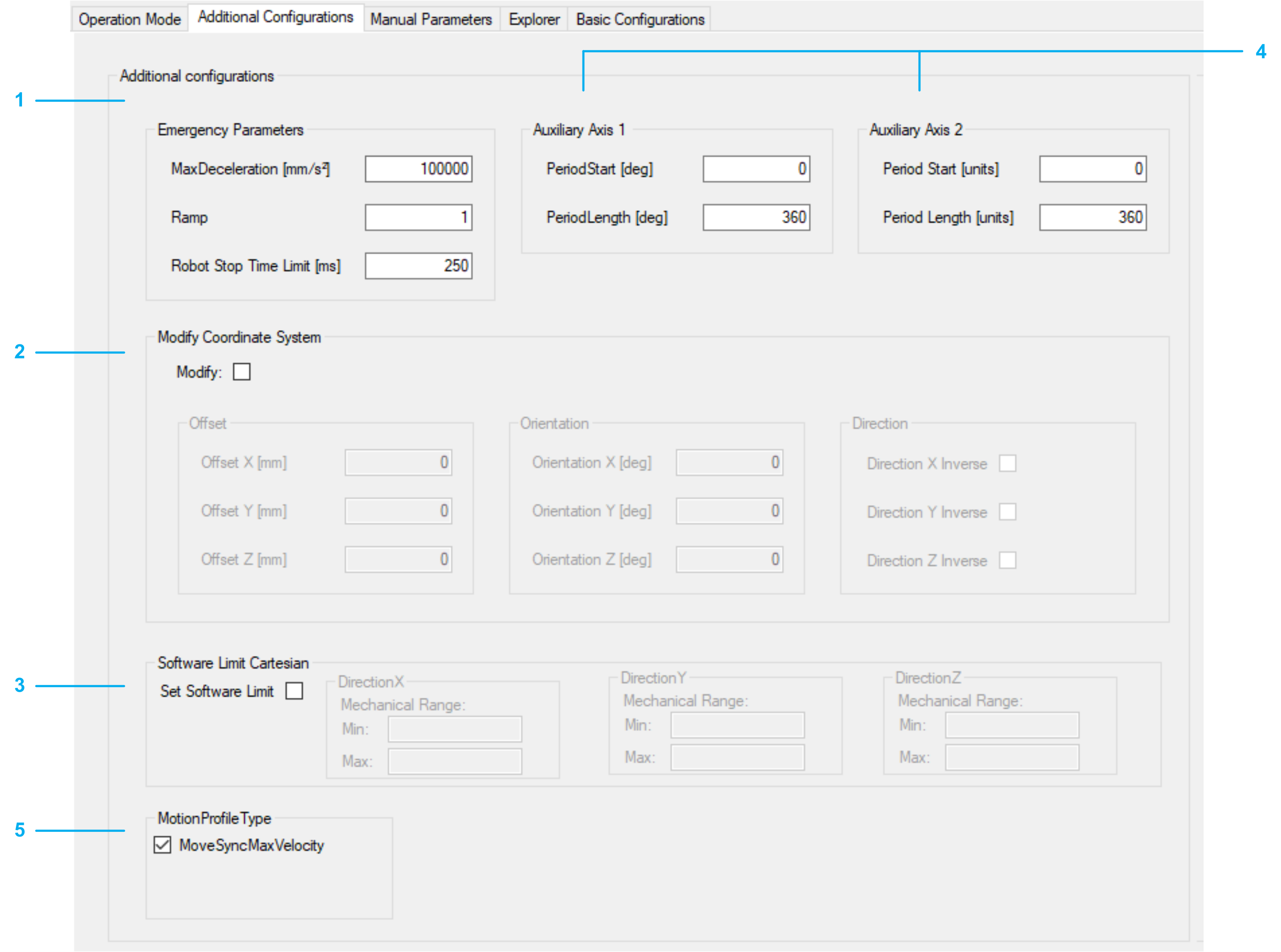
1 |
The necessary data for an emergency stop must be configured. Detailed information can be found under: SetEmergencyParameter in RoboticModule Library Guide. |
|
2 |
The robot coordinate system can be modified. If the checkbox is not selected, the coordinate system is set to default values defined by the selected robot. Detailed information can be found under: ModifyCoordinateSystem in RoboticModule Library Guide. |
|
3 |
If Set SoftwareLimit is selected the software limits are set for ROB.ET_RobotComponent.CartesianX/ CartesianY / CartesianZ. The default values, after Set SoftwareLimit is selected, are the mechanical range values. The method RM.IF_SoftwareLimit.ExecuteLimits() is called automatically. Detailed information can be found under: IF_SoftwareLimit in RoboticModule Library Guide. |
|
4 |
/ Adapt the period for the auxiliary axis if necessary. Only visible if the robot has an auxiliary axis. Detailed information can be found under: AddAuxAx in RoboticModule Library Guide. |
|
5 |
Select the checkbox for MoveSyncMaxVelocity to use the motion profile ET_MotionProfileType.MoveSyncMaxVelocity. Detailed information can be found under: IF_RobotConfigurationAdvanced - SetMotionProfileType in the Robotic Library Guide.
NOTE: MoveSyncMaxVelocity is only available if an auxiliary axis is configured for the robot.
|