Robots Tab
Overview
In this tab, you can configure the robots which are available in the RobotCell Module.
For how to add robots as submodules, refer to chapter Add Submodules to a RobotCell Module.
After adding robots as submodules, they are on the left of .
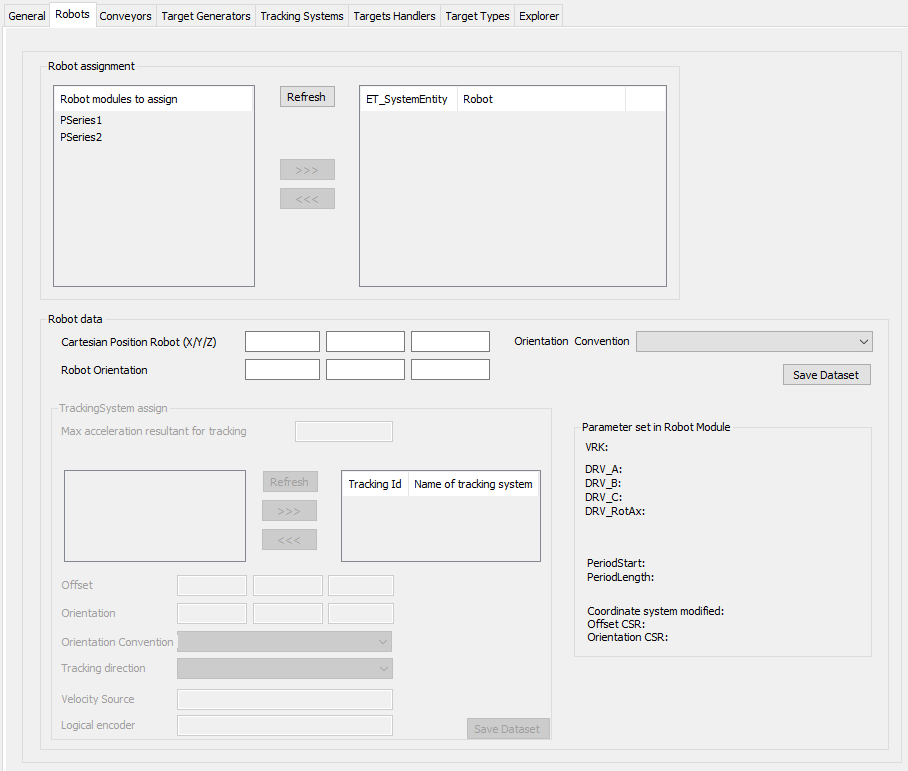
Robot Assignment
|
Element |
Description |
|---|---|
|
|
Click this button to refresh the list of available robots (for example, after adding a robot to your application). |
|
|
Select a robot to use in the RobotCell Module and click the button. Result: The robot is displayed in the list on the right of . |
|
|
Select a robot to remove from being used in the RobotCell Module and click the button. Result: The robot is displayed in the list on the left of . |
Robot Data
Select a robot in the list on the right of to display the dataset of the robot.
|
Element |
Description |
|---|---|
|
|
Enter the Cartesian positions X/Y/Z.
NOTE: The Cartesian position refers to the coordinate system of the robot cell. It does not refer to the coordinate system of the robot itself. The coordinate system of the robot can be adapted in the Configuration data tab of the robot submodule. For example, for a under .
|
|
|
Enter the robot orientation X/Y/Z. |
|
|
Select the general RobotCell value or choose another ROB.ET_OrientationConvention item from the list. It is a best practice to use the default robot cell values. |
|
|
Click this button to save the modified data. Also refer to Verifying of Parameter Modifications. |
Tracking System Data
To assign a tracking system, a tracking system must already be configured in the tab Tracking System. Refer to chapter Tracking System Tab.
A robot can have several tracking systems. For the maximum number of tracking systems, refer to ROB.ET_CoordinateSystem.
|
Element |
Description |
|---|---|
|
|
This parameter must be set to a value > 0. The method ROB.IF_RobotMotion.SetMaxAccelerationResultant() is set for ROB.ET_RobotComponent.Tracking.
NOTE: The value of the maximum acceleration resultant for tracking is valid for the tracking systems of the robot.
|
|
|
Click this button to refresh the list of available tracking systems. |
|
|
Select a tracking system to use in the RobotCell Module and click the button. Result: The tracking system is displayed in the list on the right of . |
|
|
Select a robot to remove from being used in the RobotCell Module and click the button. Result: The tracking system is displayed in the list on the left of and is no longer used within RobotCell. |
|
Set the values for the following parameters. These values are used to call the method AddLinearTrackingSystem3 for the selected robot and a linear tracking system is added. |
|
|
|
Shifting of the origin of the linear tracking system in relation to the robot coordinate system ROB.ET_CoordinateSystem.CSR. Unit: [mm] |
|
|
Rotation of the linear tracking system in relation to the robot coordinate system ROB.ET_CoordinateSystem.CSR. Unit: [°] |
|
|
Convention for the rotation angles of the orientation (ROB.ET_OrientationConvention). |
|
|
Positive Cartesian axis of the tracking coordinate system which is used for tracking (ROB.ET_RobotComponent). |
|
|
Velocity source of the linear tracking system. |
|
|
Logical encoder which is linked to the velocity source. |
|
|
Click this button to save the modified data. Also refer to Verifying of Parameter Modifications. |