Call Robot in Your Program
PacDrive 3 Template
|
Step |
Action |
|---|---|
|
1 |
Copy the code snippets of the tab (refer to Robot Explorer) to the desired location in your application code. 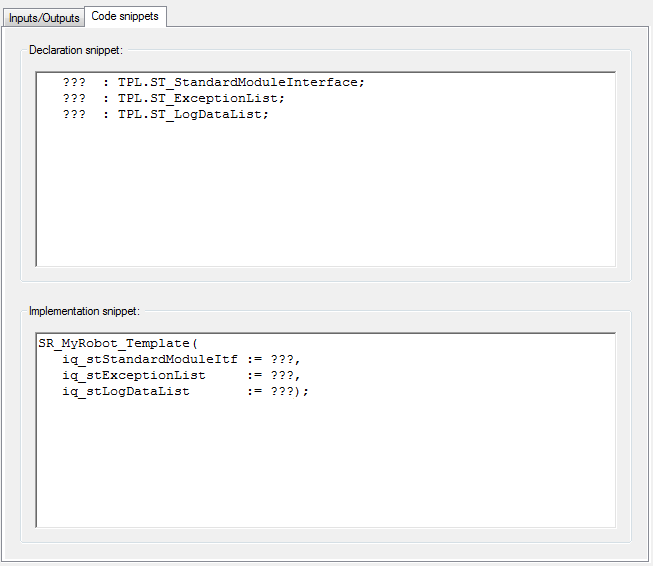
|
|
2 |
If you are using PacDrive 3 Template, it is typically inside SubModules_Action (of SR_MainMachine or equivalent in a node module) which typically uses the FBD language. To use the code snippets of , you can use the EXECUTE box to add code in structured text. 
|
|
3 |
Add the in/out variables specific to your application. The variables used are only an example. |
Non Template
|
Step |
Action |
|---|---|
|
1 |
Copy the code snippets of the tab (refer to Robot Explorer) to the desired location in your application code. 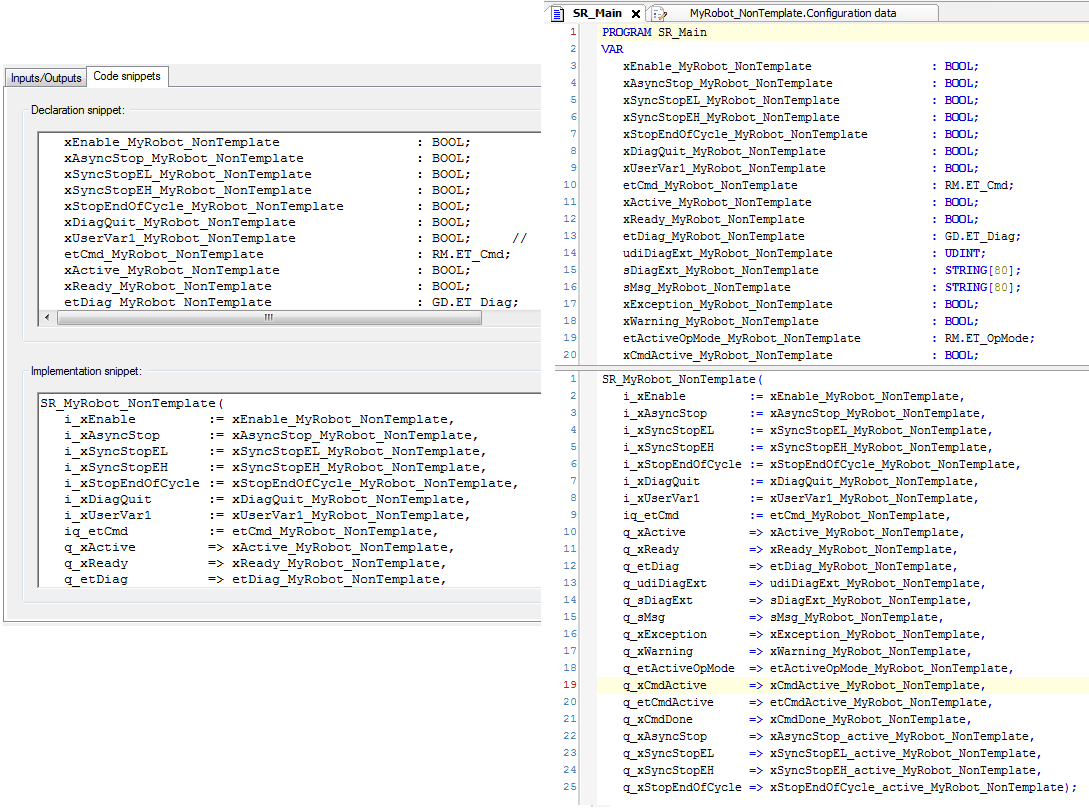
|
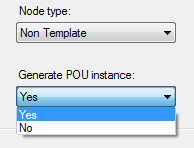
If you select for this option, the program call and the corresponding task call is generated by the system. Refer to Code generation option for Non Template robots.