Werkzeugversatz konfigurieren
Sie können den Versatz zwischen dem Flanschkoordinatensystem der Kinematik (XYZ) und dem TCP-Koordinatensystem der Kinematik (X’Y’Z‘) durch Konfiguration eines Werkzeugversatzes (Tooloffset) einstellen. Dieser Werkzeugversatz wirkt auf alle nachfolgenden Bewegungen.
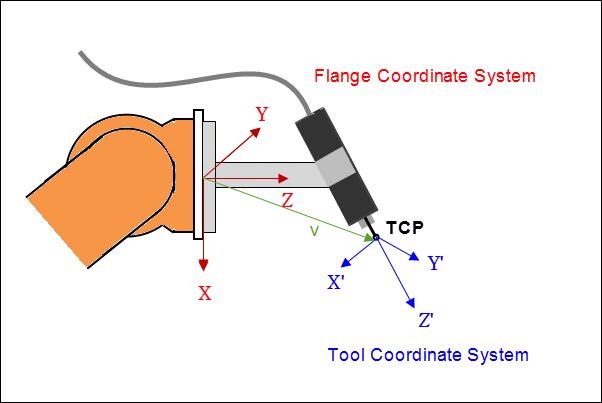
TCP: Tool Center Point
Der Werkzeugversatz wird durch eine Verschiebung v=(x,y,z) und eine Drehung r=(A,B,C) in ZYZ-Eulerwinkeln vorgegeben. Verschiebung und Drehung werden relativ zum Flanschkoordinatensystem der Kinematik ausgedrückt.
Wenn Sie einen Werkzeugversatz konfigurieren, kann dieser inkompatibel zur aktuellen Kinematik sein. So kann ein Werkzeugversatz dazu führen, dass die Kinematik Orientierungen nicht erreichen kann . In dieser Situation wird ein Fehler zurückgemeldet und der Werkzeugversatz wird ignoriert. Beispielsweise können Sie für die Kinematik Kin_Scara2_Z einen Werkzeugversatz in Z-Richtung konfigurieren. Ein Versatz mit Anteile in X- oder Y-Richtung führt dagegen zum Fehler. Hat eine Kinematik solche Einschränkungen, dann sind diese bei der Kinematik beschrieben.