Kombination von Positionier- und Werkzeugkinematiken
Mit dem Achsgruppenkonfigurator können Sie Positionierkinematiken und Werkzeugkinematiken kombinieren. Dadurch kann mit einer kleinen Anzahl von Kinematiken eine große Vielfalt an Robotern konfiguriert werden.
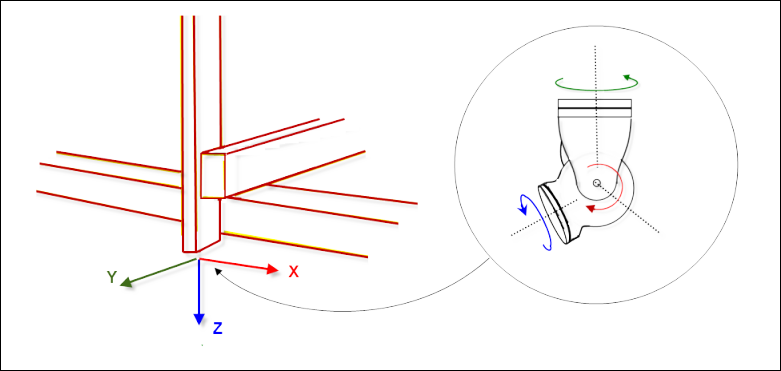
Beispiele für Positionierkinematiken sind Portale (Kin_Gantry3) oder Tripoden (Kin_Tripod_Lin, Kin_Tripod_Rotary). Diese Kinematiken können eine beliebige Position anfahren, nicht aber beliebige Orientierungen herbeiführen. Das vorderste Koordinatensystem einer Positionierkinematik bezeichnen wir als Flanschkoordinatensystem. Es definiert die Stelle, an der eine Orientierungskinematik befestigt wird (linke Abbildung).
Beispiele für Orientierungskinematiken sind Kin_CAxis, Kin_Wrist2 und Kin_Wrist3. Diese Kinematiken können eine gewünschte Orientierung des TCP herbeiführen, aber nicht eine beliebige Position erreichen (rechte Abbildung).
Durch die Kombination einer Positionierkinematik mit einer Orientierungskinematik wird es möglich, beliebige Positionen innerhalb der gewünschten Orientierung anzufahren und umgekehrt.