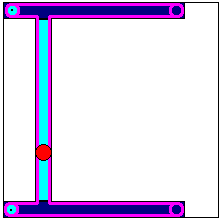
H-Portalsystem mit stationären Achsen
Die kinematische Konfiguration ist ähnlich wie beim Portalsystem, jedoch sind die Achsen (Antriebe) fest montiert. Sie bewegen den Werkzeugträger mit Hilfe eines Riemens.
Die Transformation durch die Bausteine SMC_TRAFO_GantryH2 und SMC_TRAFOF_GantryH2 setzt folgende Achskonfigurationen voraus. (Andere Konfigurationen können durch Vertauschen von x und y erreicht werden):
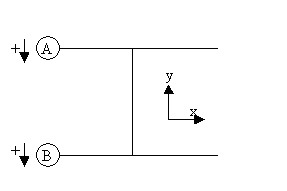
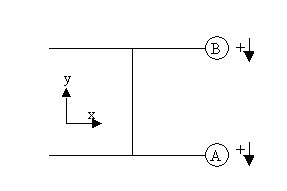
Diese Transformation erfordert eine spezielle Referenzfahrt: Beide Achsen müssen mit gleicher Geschwindigkeit bewegt werden. Wenn in X-Richtung gefahren werden soll, müssen die Antriebe A und B bewegt werden, während sie für eine reine X-Bewegung mit entgegengesetzter Geschwindigkeit bewegt werden müssen. Wenn die Referenzposition gefunden wurde, werden die vom Vorwärtstransformationsbaustein berechneten X- und Y-Werte als Offset verwendet (dOffsetX und dOffsetY).