6-Achs-Knickarmroboter
Transformation eines Knickarmroboters mit 6 Drehachsen und 6 Freiheitsgraden (DoF). Die 3 Orientierungsachsen des Roboterarms schneiden sich in einem einzigen Punkt, dem Handgelenksmittelpunkt.
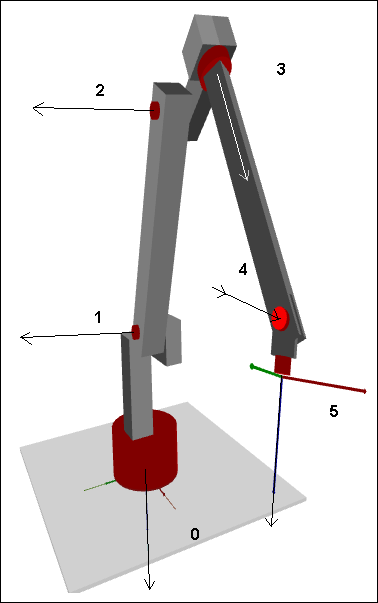
Die Funktionsbausteine SMC_Trafo_ArticulatedRobot_6DOF und SMC_TrafoF_ArticulatedRobot_6DOF implementieren Vorwärts- und Rückwärtstransformationen eines Knickarmroboters mit sechs drehenden Achsen. In der Abbildung ist das Weltkoordinatensystem unten an der Achse 0 eingezeichnet. Die z-Achse zeigt nach unten, die x-Achse zeigt nach vorne auf in Richtung des Werkzeugmittelpunkts (TCP). Der Ursprung des Weltkoordinatensystems ist der Schnittpunkt von Achse 0 und dem Boden des Roboters.