Behavior of ChangeCoordinateSystem2 in Case Calculated Resulting Acceleration Exceeds Limit
General
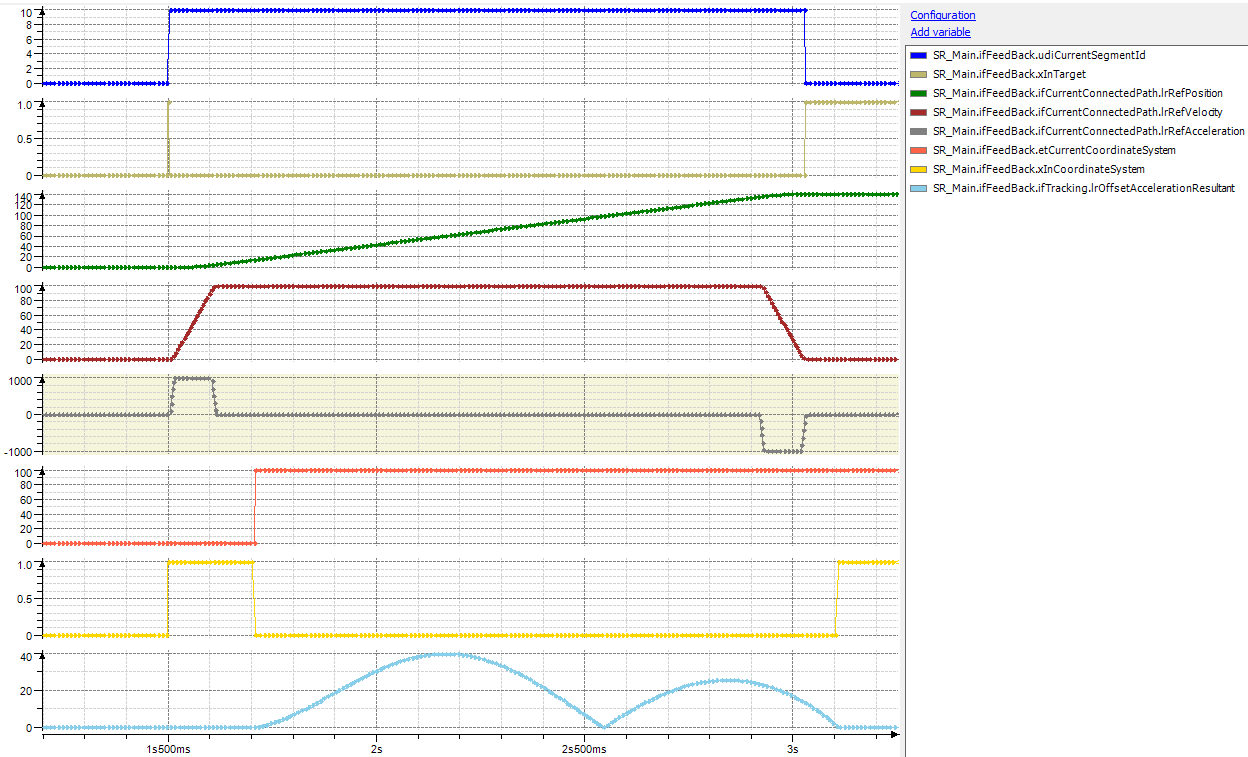
In case the necessary resulting acceleration for the synchronization phase exceeds the limit set by IF_RobotMotion.SetMaxAccelerationResultant(…), the resulting acceleration for the synchronization phase is limited to this maximum value.
As an effect, the tracking will not be finished at the given end position.
Trace
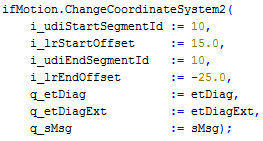
In this trace, the resulting acceleration for the synchronization phase was limited to 40 mm/sec2. As a result, the synchronization phase is finished after the end of the connected path is reached, even if the command IF_RobotMotion.ChangeCoordinateSystem2(…) is configured with an end offset of -25.0.