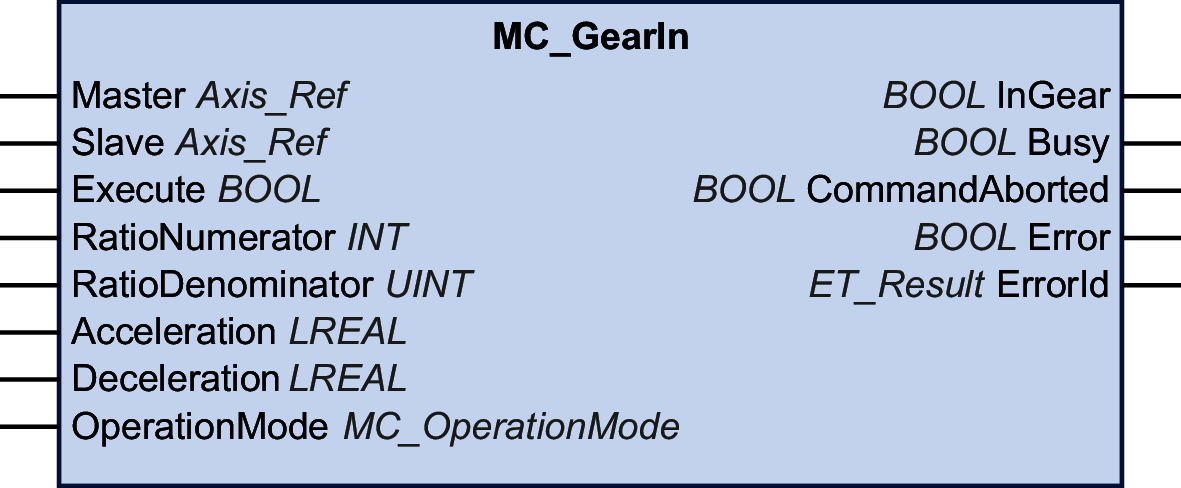
MC_GearIn
Funktionsbeschreibung
Dieser Funktionsbaustein aktiviert die Kopplung einer Masterachse und einer Unterachse mit einem gegebenen Übersetzungsverhältnis zwischen der Position oder Geschwindigkeit der Masterachse und der Unterachse, abhängig von der Betriebsart.
Die Unterachse folgt synchron der Bewegung der Masterachse (Positions- oder Geschwindigkeitssynchronität).
Über die Eingänge RatioNumerator und RatioDenominator kann ein benutzerspezifisches Übersetzungsverhältnis für die Bewegung der untergeordneten Achse eingestellt werden.
-
In der Betriebsart Cyclic Synchronous Position erfolgt die Kopplung basierend auf Positionswerten. Bei einem Übersetzungsverhältnis von 1:2 bewegt sich die Unterachse beispielsweise um die Hälfte des Abstands des Masters.
-
In der Betriebsart Cyclic Synchronous Velocity erfolgt die Kopplung auf der Basis von Geschwindigkeitswerten. Bei einem Übersetzungsverhältnis von 1:2 bewegt sich die Unterachse beispielsweise mit halber Geschwindigkeit des Masters.
Eingänge
|
Eingang |
Datentyp |
Beschreibung |
|---|---|---|
|
Master |
Axis_Ref |
Verweis auf die Achse, für die der Funktionsbaustein ausgeführt werden soll. |
|
Slave |
Axis_Ref |
Verweis auf die Achse, für die der Funktionsbaustein ausgeführt werden soll. |
|
Execute |
BOOL |
Wertebereich: FALSE, TRUE. Standardwert: FALSE. Eine steigende Flanke des Eingangs Execute startet den Funktionsbaustein. Der Funktionsbaustein setzt die Ausführung fort, und der Ausgang Busy wird auf TRUE gesetzt. Dieser Funktionsbaustein kann während seiner Ausführung neu gestartet werden. Die Zielwerte werden zum Zeitpunkt des Auftretens der steigenden Flanke durch die neuen Werte überschrieben. |
|
RatioNumerator |
INT |
Wertebereich: -2147483648 bis 2147483647 Standardwert: 1 Zähler des Übersetzungsverhältnisses.
HINWEIS: Der Wert 0 ist ungültig.
|
|
RatioDenominator |
UINT |
Wertebereich: 1 bis 2147489647 Standardwert: 1 Nenner des Übersetzungsverhältnisses. |
|
Acceleration |
LREAL |
Wertebereich: Ein positiver LREAL-Wert Standardwert: 0 Beschleunigung in Benutzereinheiten. Der Wert an diesem Eingang wird verwendet, um die angegebene Zielgeschwindigkeit (Beschleunigung) zu erreichen. |
|
Deceleration |
LREAL |
Wertebereich: Ein positiver LREAL-Wert Verzögerung in Benutzereinheiten. Standardwert: -1
HINWEIS: Wenn der am Eingang Deceleration angezeigte Standardwert -1 als Signal verwendet wird, dass der Parameter nicht geändert wurde, wird daher der Wert am Eingang Acceleration auch für die Verzögerung verwendet.
Dies ist der Schwellenwert der Beschleunigung während der Rampenphase von MC_GearIn für den Fall, dass der Absolutwert der Geschwindigkeit der untergeordneten Achse abnimmt. |
|
OperationMode |
Betriebsart für Funktionsbaustein Standardwert: Position |
Ausgänge
|
Ausgang |
Datentyp |
Beschreibung |
|---|---|---|
|
InGear |
BOOL |
Wertebereich: FALSE, TRUE. Standardwert: FALSE.
|
|
Busy |
BOOL |
Wertebereich: FALSE, TRUE. Standardwert: FALSE.
|
|
CommandAborted |
BOOL |
Wertebereich: FALSE, TRUE. Standardwert: FALSE.
|
|
Error |
BOOL |
Wertebereich: FALSE, TRUE. Standardwert: FALSE.
|
|
ErrorID |
Diese Aufzählung stellt Diagnoseinformationen zur Verfügung. |
Hinweise
Der Eingang Acceleration muss auf einen Wert größer als 0 gesetzt werden, bevor der Funktionsbaustein ausgeführt wird.
Das Übersetzungsverhältnis kann während einer Bewegung geändert werden. Die neuen Werte werden jedoch erst bei der nächsten steigenden Flanke des Eingangs Execute berücksichtigt.
Die Unterachse verwendet die Werte für Acceleration und Jerk nur während der ersten Beschleunigungsphase. Die Unterachse folgt dann der Masterachse.
Wenn die Betriebsart über den Eingang OperationMode auf Velocity eingestellt ist und der Antrieb nicht in der Betriebsart Cyclic Synchronous Velocity arbeiten kann, erkennt der Funktionsbaustein MC_CamIn einen Fehler. Die Achse wird dadurch nicht beeinflusst.
Die Bibliothek stellt keinen separaten Funktionsbaustein MC_GearOut zur Verfügung. Ein ausgeführter Funktionsbaustein kann durch einen anderen Funktionsbaustein ersetzt werden.