Calibration
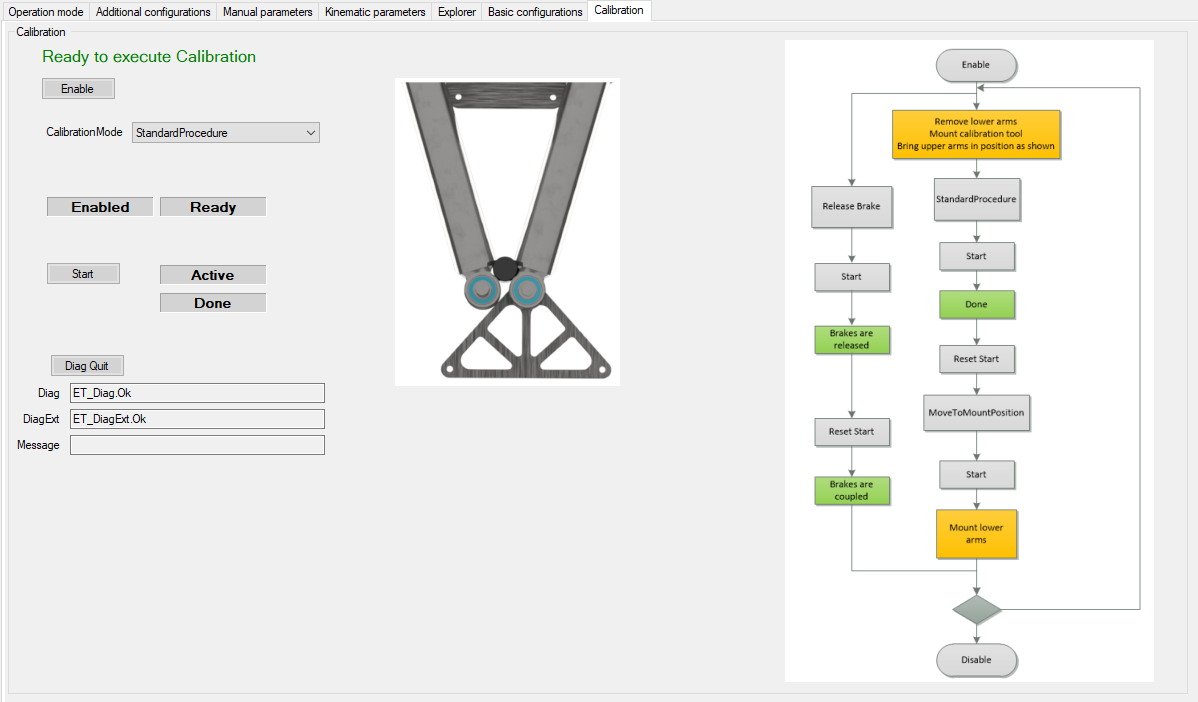
StandardProcedure
To start the the robot must be in the displayed position.
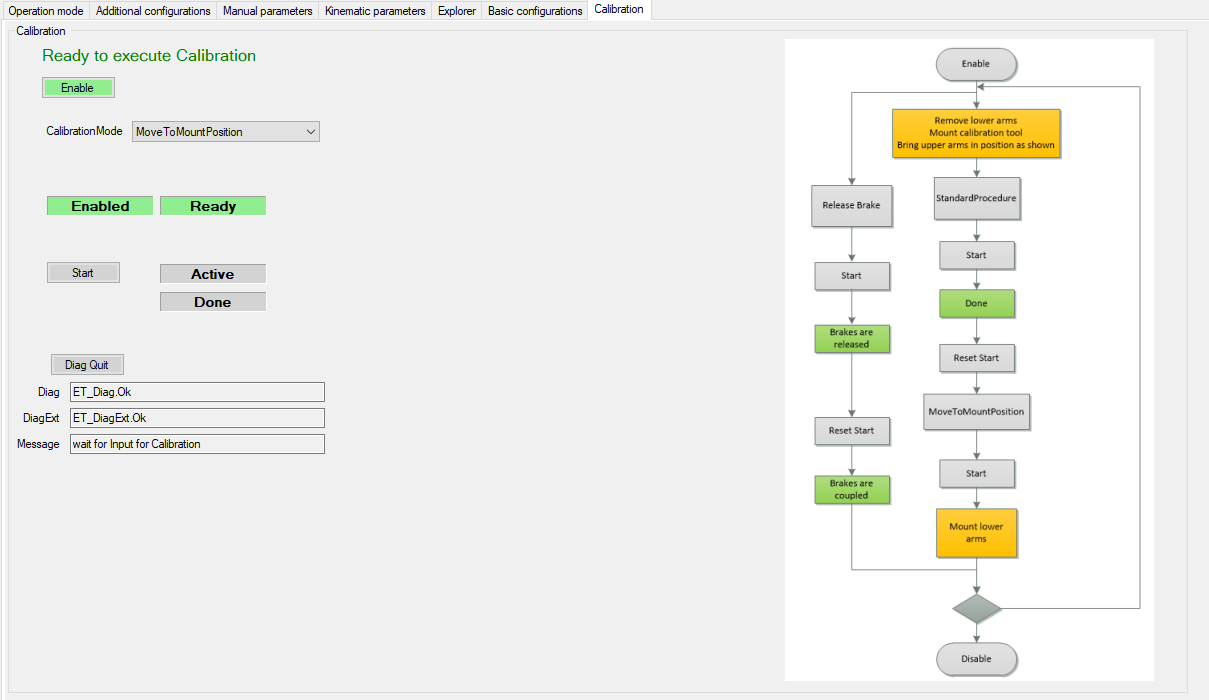
NOTE: Remove lower arms, mount calibration tool, bring upper arm in position as shown in the picture. You can use the mode to bring the robot arms in this position.
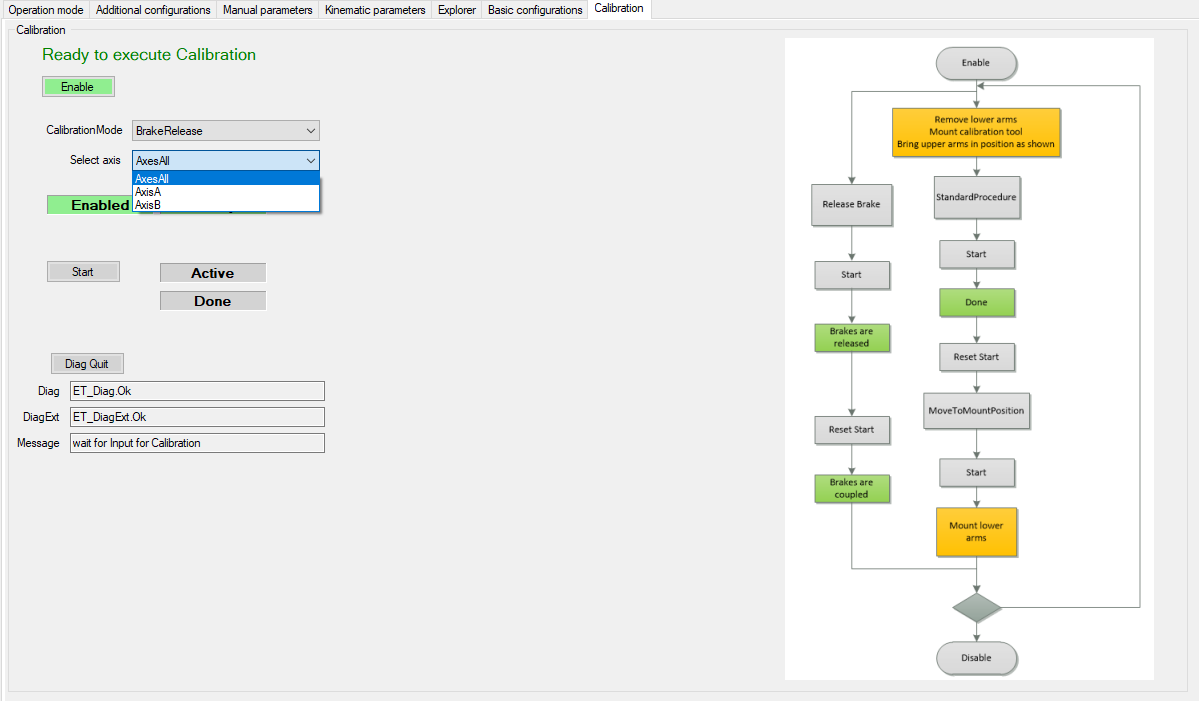
Select:
-
-
-
-
-
Result: The robot moves to the specified position where the arms can be mounted.