Programming a Robot with Pick&Place
See the Robotics_PickAndPlace.project and Robotics_PickAndPlace_without_Depictor.project sample projects in the installation directory of CODESYS under ..\CODESYS SoftMotion\Examples.
The Robotics_PickAndPlace.project project requires the CODESYS Depictor Depictor package to be installed. This project displays the kinematics in a 3D animation. The project Robotics_PickAndPlace_without_Depictor.project shows a simplified form of the sequence in a visualization screen.
This chapter covers only the objects which are relevant for SoftMotion.
|
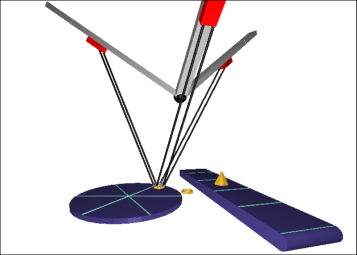
The example consists of a tripod, a rotary table, and a conveyor. The kinematics pick up a ring that is located on the rotary table. When picking up, the tool plate of the kinematics move synchronously with the rotary table. Then the ring is placed on a cone that is located on a conveyor belt. When placing, the kinematics move synchronously with the conveyor belt. Two buttons are located on the visualization screen for controlling the sequence. When you press the Auto button, the rings are set down automatically. Otherwise, the Play button appears for you to place the ring. |
|