5-Axis Transformation
With the 5-axis transformation, you can control kinematics that consist of three linear spatial axes (X, Y, Z) and a tool head. The tool head consists of two axes that hold the tool. A tool axis rotates about the Z axis, and the tool tilts the others according to the following scheme.
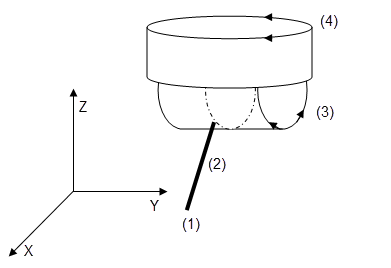
Parameter: Length of dTool = Distance from the processing point (tool tip = TCP) to the rotary axis inclination.
Control of the 5-axis transformation by five positional values:
-
X/Y/Z-position of the processing point (TCP) that is included in
pi.dX, pi.dY, pi.dZ. Unit: Position units of the axes. -
Orientation of the tool by spherical coordinates (inclination and azimuth) that are included in
pi.dBandpi.dC. Unit: Angular degrees.
Zero position
-
The processing point (TCP) is located at the position (
0/0/-dTool). -
The tool extends in the direction of the negative Z axis. The rotary axis inclination is positioned in such a way that rotating in the positive direction would move the tool in the direction of the positive X axis.
Example
For the movement N30, the inclination axis that first points in the X direction is rotated and it remains tilted in the negative X direction at the end of the movement.
N0 PB360 PC360 (set axis B and C in modulo mode 360)
N10 F10 FB100 FC100 (velocity in X/Y/Z: 10, in B and C 100)
N20 G0 X0 Y0 Z0 C0 B30 (start position)
N30 G1 X20 B-30 (target position)For more information, see: SMC_TRAFO_5Axes (FB) and SMC_TRAFOF_5Axes (FB)