IF_CollisionHandlerDelta2Ax – UpdateFromJointPositions (Method)
Description
Update the position and orientation of each default collision object based on the joint positions provided as input. The default collision objects are those that are automatically created and configured inside the collision entity of the collision handler.
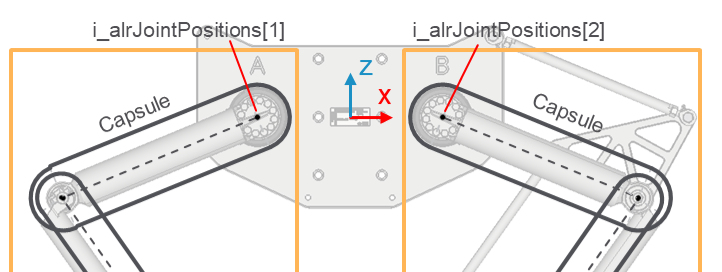
The following graphic shows the elements of i_alrJointPositions:
Interface
Access: PUBLIC
|
Input |
Data type |
Description |
|---|---|---|
|
i_alrJointPositions |
ARRAY [1...Gc_udiDelta2AxNumberOfJoints] OF LREAL |
Joint positions of a Delta2Ax robot. |
|
Output |
Data type |
Description |
|---|---|---|
|
q_xError |
BOOL |
The output is set to TRUE if an error has been detected during the execution. |
|
q_etResult |
POU-specific output on the diagnostic; q_xError = FALSE -> Status message; q_xError = TRUE -> Diagnostic message. |
|
|
q_sResultMsg |
STRING(80) |
Event-triggered message that gives additional information on the diagnostic state. |