Velocity Threshold Value
Description
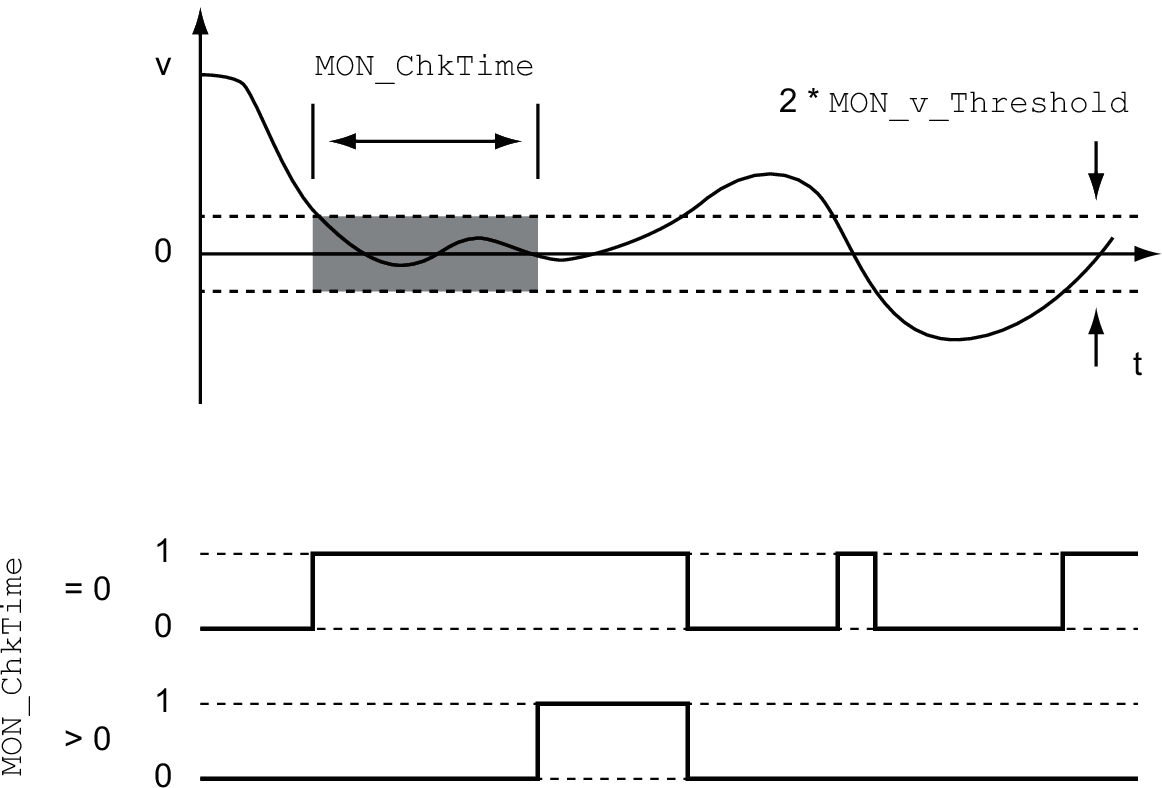
The velocity threshold value allows you to monitor whether the actual velocity is below a parameterizable velocity value.
The velocity threshold value comprises the velocity and the monitoring time.
Status Indication
The status is available via a signal output.
In order to read the status via a signal output, you must first parameterize the signal output function "Velocity Below Threshold", see Digital Signal Inputs and Digital Signal Outputs.
The parameter MON_ChkTime acts on the parameters MON_p_DiffWin_usr, MON_v_DiffWin, MON_v_Threshold and MON_I_Threshold.
|
Parameter name HMI menu HMI name |
Description |
Unit Minimum value Factory setting Maximum value |
Data type R/W Persistent Expert |
Parameter address via fieldbus |
|---|---|---|---|---|
|
Monitoring of velocity threshold. The system monitors whether the drive is below the defined value during the period set with MON_ChkTime. The status can be output via a parameterizable output. Type: Unsigned decimal - 4 bytes Write access via Sercos: CP2, CP3, CP4 Modified settings become active immediately. |
usr_v 1 10 2147483647 |
UINT32 R/W per. - |
Modbus 1590 IDN P-0-3006.0.27 |
|
|
Monitoring of time window. Adjustment of a time for monitoring of position deviation, velocity deviation, velocity value and current value. If the monitored value is in the permissible range during the adjusted time, the monitoring function delivers a positive result. The status can be output via a parameterizable output. Type: Unsigned decimal - 2 bytes Write access via Sercos: CP2, CP3, CP4 Modified settings become active immediately. |
ms 0 0 9999 |
UINT16 R/W per. - |
Modbus 1594 IDN P-0-3006.0.29 |