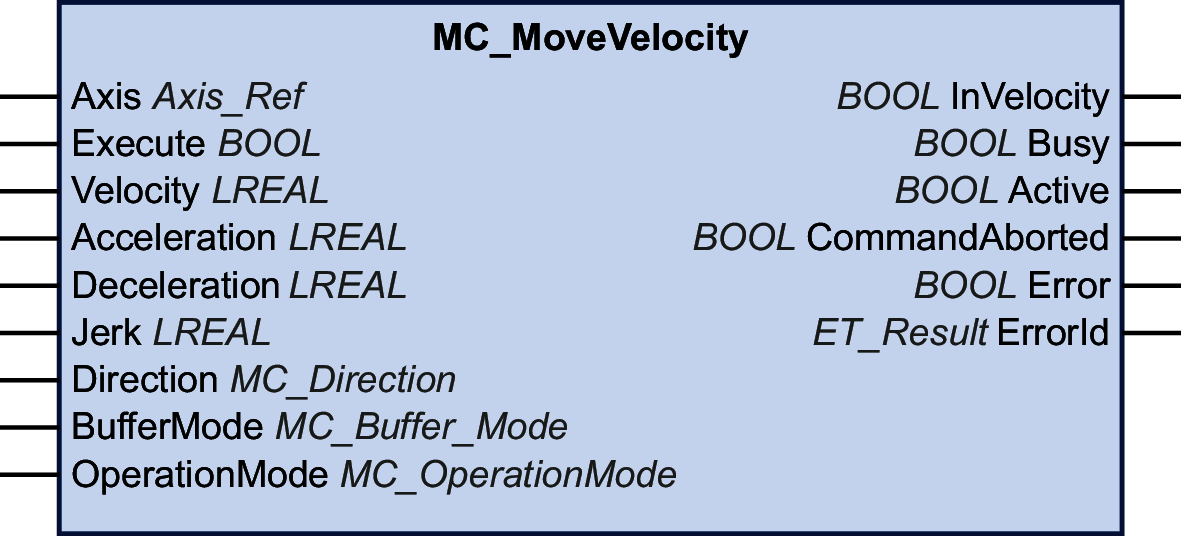
MC_MoveVelocity
Inputs
|
Input |
Data type |
Description |
|---|---|---|
|
Axis |
Axis_Ref |
Reference to the axis for which the function block is to be executed. |
|
Execute |
BOOL |
Value range: FALSE, TRUE. Default value: FALSE. A rising edge of the input Execute starts the function block. The function block continues execution and the output Busy is set to TRUE. This function block can be restarted while it is executed. The target values are overwritten by the new values at the point in time the rising edge occurs. |
|
Velocity |
LREAL |
Value range: -2147483648...2147483647 Default value: 0 Target velocity in user-defined units. Negative values for the target velocity invert the direction of the movement. |
|
Acceleration |
LREAL |
Value range: A positive LREAL value Default value: 0 Acceleration in user-defined units. The value at this input is used to reach the specified target velocity (acceleration). |
|
Deceleration |
LREAL |
Value range: A positive LREAL value Deceleration in user-defined units. Default value: -1
NOTE: If the default value of -1 presented at the input Deceleration is used as a signal that the parameter has not been modified and therefore, the value at the input Acceleration is also used for the deceleration.
|
|
Jerk |
LREAL |
Value range: A positive LREAL value and zero
Default value: 0 |
|
Direction |
Default value: PositiveDirection Direction of movement. Possible values:
See MC_Direction for a description of the values. |
|
|
BufferMode |
Default value: Aborting Buffer mode. Possible values:
See MC_Buffer_Mode for a description of the values. |
|
|
OperationMode |
Default value: Position Type of operation for this function block. Possible values:
See MC_OperationMode for a description of the values. |
Outputs
|
Output |
Data type |
Description |
|---|---|---|
|
InVelocity |
BOOL |
Value range: FALSE, TRUE. Default value: FALSE.
|
|
Busy |
BOOL |
Value range: FALSE, TRUE. Default value: FALSE.
NOTE: The output Busy remains TRUE even when the target velocity has been reached or Execute becomes FALSE. The output Busy is set to FALSE as soon as another function block such as MC_Stop is executed.
|
|
Active |
BOOL |
Value range: FALSE, TRUE. Default value: FALSE.
|
|
CommandAborted |
BOOL |
Value range: FALSE, TRUE. Default value: FALSE.
|
|
Error |
BOOL |
Value range: FALSE, TRUE. Default value: FALSE.
|
|
ErrorID |
This enumeration provides diagnostics information. |
Notes
The output Busy remains TRUE even if the target velocity has been reached or the input Execute is set to FALSE. The output Busy is set to FALSE as soon as another function block such as MC_Stop is executed.
If you use MC_MoveVelocity to move an axis continuously in the same direction and if the input OperationMode is set to Position, define this axis as modulo axis. Refer to Movement Range and Position Calculation With Floating-Point Numbers for additional information.
The function block can be used with two different operating modes. See data type MC_OperationMode for details.