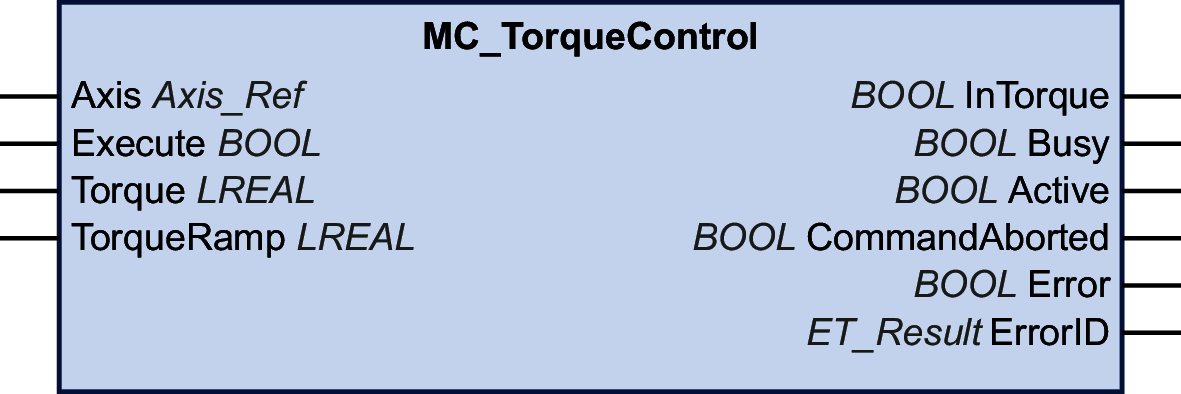
MC_TorqueControl
Functional Description
This function block allows you to operate a drive in the operating mode Cyclic Synchronous Torque (CST).
In the operating mode Cyclic Synchronous Torque, movements are made with a specified target torque. The target torque in Nm is provided via the input Torque. The permissible torque range at this input is -30 times the continuous stall torque (M_M_0_) to +30 times the continuous stall torque of the motor connected to the drive. Negative values start a movement in negative direction of movement.
The continuous stall torque is a motor-specific value. During phasing-up (transition to Communication Phase 2), the system determines the continuous stall torque value via the parameter P-3013-0-22. When the function block is started (value at the input Execute is set to TRUE), the system verifies that the torque value at the input Torque is valid.
The input TorqueRamp allows you to specify a torque ramp in Nm/s. If the value at the input TorqueRamp is 0, the torque specified via the input Torque is generated immediately without a torque ramp.
The output InTorque is set to TRUE once the specified target torque is reached.
The function block can be started when the axis is in the operating state StandStill.
If the requested operating mode is not confirmed by the drive within 30 Sercos cycles, an error is detected (output Error of the requesting function block is set to TRUE).
Inputs
|
Input |
Data type |
Description |
|---|---|---|
|
Axis |
Axis_Ref |
Reference to the axis for which the function block is to be executed. |
|
Execute |
BOOL |
Value range: FALSE, TRUE. Default value: FALSE. A rising edge of the input Execute starts the function block. The function block continues execution and the output Busy is set to TRUE. This function block can be restarted while it is executed. The target values are overwritten by the new values at the point in time the rising edge occurs. |
|
Torque |
LREAL |
Target torque for the operating mode Cyclic Synchronous Torque in Nm Value range: A positive LREAL value Value range: -30 * continuous stall torque (M_M_0_) to +30 * continuous stall torque (M_M_0_) of the connected motor Negative values trigger a movement in negative direction, positive values trigger a movement in positive direction of movement. Default value: 0 |
|
TorqueRamp |
LREAL |
Torque ramp for the operating mode Cyclic Synchronous Torque in Nm/s. If the input is set to 0, the target torque specified via the input Torque is generated immediately without a torque ramp. Value range: A positive LREAL value Default value: 0 |
Outputs
|
Output |
Data type |
Description |
|---|---|---|
|
InTorque |
BOOL |
This output indicates whether the specified target torque has been reached.
Value range: FALSE, TRUE. Default value: FALSE.
|
|
Busy |
BOOL |
Value range: FALSE, TRUE. Default value: FALSE.
|
|
Active |
BOOL |
Value range: FALSE, TRUE. Default value: FALSE.
|
|
CommandAborted |
BOOL |
Value range: FALSE, TRUE. Default value: FALSE.
|
|
Error |
BOOL |
Value range: FALSE, TRUE. Default value: FALSE.
|
|
ErrorID |
This enumeration provides diagnostics information. |
In the operating mode Cyclic Synchronous Torque, the drive can be in the PLCopen operating state Standstill. In this operating state, the target torque is 0 Nm. When the torque is 0 Nm, movements are possible, for example due to external forces. There is no monitoring for physical standstill of the motor.
| WARNING | |
|---|---|
Notes
The checkbox TorqueOperationMode on the tab Feature Configuration needs to be checked to enable the operating mode Cyclic Synchronous Torque.
In the case of LMX28S drives, you can use either the operating mode Cyclic Synchronous Torque or the operating mode Cyclic Synchronous Velocity (the operating modes are not available at the same time). Check only one of the two checkboxes.
You can use the function block MC_ReadActualTorque to read the torque value.