IF_TeachingOrientation - EstimateOrientation (Method)
Description
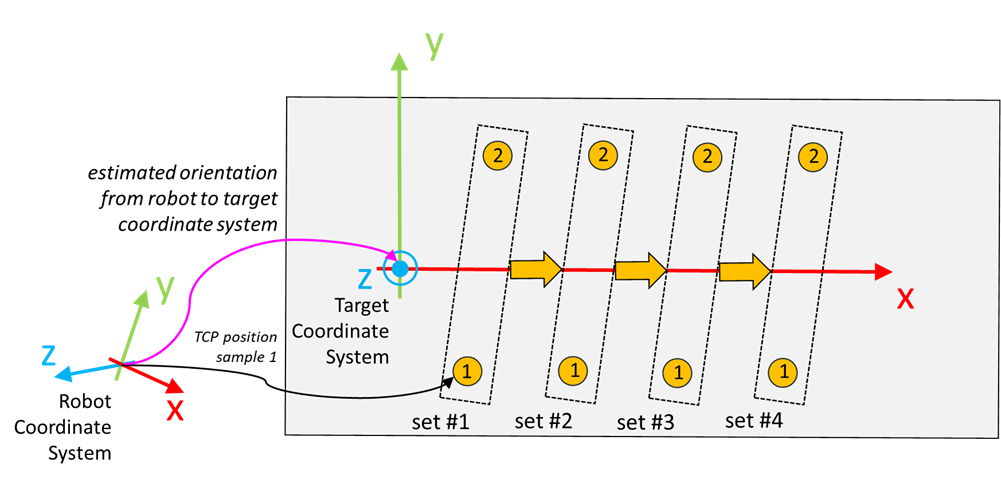
With the method EstimateOrientation(...), an orientation based on the provided set of samples is estimated.
Example:
Access: PUBLIC
Interface
|
Input |
Data type |
Description |
|---|---|---|
|
i_etOrientationConvention |
GEM.ET_OrientationConvention |
Orientation convention that must be used for the estimated orientation. Default value: GEM.ET_OrientationConvention.ZYX |
|
i_lrQualityTolerance |
LREAL |
Value used to make a comparison between the provided samples and the estimated pose. Refer to the outputs q_lrSamplesDirectionQuality and q_lrSamplesPlaneQuality for more information. Default value: 1.0 mm |
|
Output |
Data type |
Description |
|---|---|---|
|
q_xError |
BOOL |
TRUE: An error occurred during last command. For more information refer also to q_etResult and q_sResultMsg. |
|
q_etResult |
Provides diagnostic and status information. If q_xError = FALSE, then q_etResult provides status information. If q_xError = TRUE, then q_etResult provides diagnostic/error information. The enumeration ET_Result contains the possible values of the POU operation results. |
|
|
q_sResultMsg |
STRING[80] |
Event-triggered message that gives more detailed information on the diagnostic state. |
|
q_stRotationMatrix |
SE_MATH.ST_Matrix3D |
Estimated orientation described as a 3D rotation matrix. |
|
q_lrSamplesDirectionQuality |
LREAL |
Percentage value that gives an indication of the quality of the estimated X direction. It depends on the number of samples that are more distant from the estimated X direction than i_lrQualityTolerance. Range: [0, 100] |
|
q_lrSamplesPlaneQuality |
LREAL |
Percentage value that gives an indication of the quality of the estimated XY plane. It depends on the number of samples that are more distant from the estimated XY plane than i_lrQualityTolerance. Range: [0, 100] |