Basic Configurations
Overview
General
|
Element |
Description |
|---|---|
|
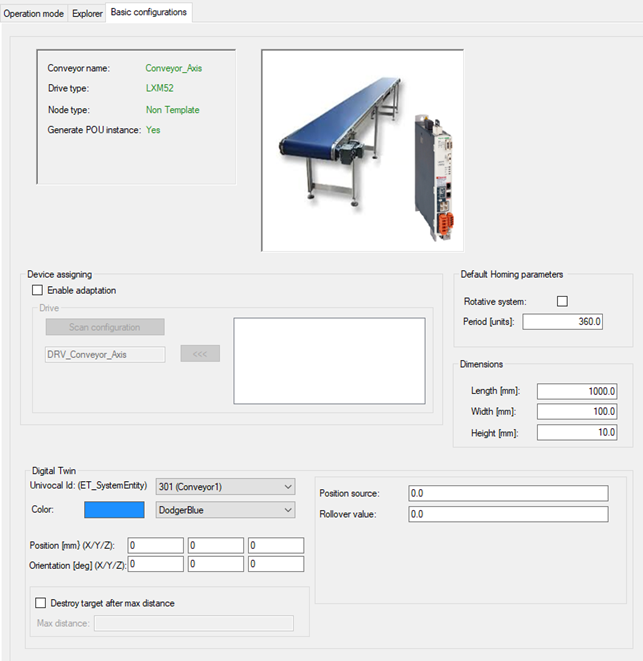
Conveyor data |
Displays the data of the selected conveyor. |
|
Graphic |
Displays a graphic of the selected conveyor. |
Device assigning
|
Element |
Description |
|---|---|
|
Device assigning |
Assigns devices to modules. For further information on how to proceed, refer to Device Assigning. |
Default Homing parameters
|
Element |
Description |
|---|---|
|
Rotative system |
The default parameter Rotative system is used for several structure variables.
|
| Period |
The default parameter Period is used for several structure variables.
|
|
|
Configures the dimensions of the conveyor (length, width, height). The dimensions can be read via the method SR_<MyConveyor>.GetDimensions().
NOTE: The parameters for length/width/height are not verified against other parameters, for example stTargets or the position of the conveyor.
|
Digital Twin - Conveyor Module not as submodule of RobotCell
|
Element |
Description |
|---|---|
|
Univocal Id |
Selects a unique ID for the conveyor. Ensure that the Univocal Id is unique for all conveyors used in one project that is connected to a Digital Twin. |
|
Control mode |
Not editable, is set to DTC.ET_ConveyorControlMode.PositioningModuloRollover. |
|
Color |
Selects a color. |
|
Position and Orientation |
Sets the position and orientation to place the conveyor in the Digital Twin. |
|
Position source |
For the position source, you can use the position of a drive or encoder (LE_Encoder.Position) or using an IEC variable of type LREAL. In the case of an IEC variable you must ensure that the variable is updated in time. |
|
Rollover value |
For the rollover value, a value that do not change during execution must be set, therefore either a fix value can be set or an IEC variable of type LREAL. |
|
Destroy target after max distance |
If the checkbox is selected, set a value for the maximum distance in the Digital Twin. |
Digital Twin - Conveyor Module as submodule of RobotCell
|
Element |
Description |
|---|---|
|
Univocal Id |
Selects a unique ID for the conveyor. Ensure that the Univocal Id is unique for all conveyors used in one project that is connected to a Digital Twin. |
|
Control mode |
Not editable, is set to DTC.ET_ConveyorControlMode.PositioningModuloRollover. |
|
Color |
Selects a color. |
|
Position and Orientation |
Sets the position and orientation to place the conveyor in the Digital Twin. |
|
Position source and Rollover value |
For position source and rollover value, you can select between:
|
|
Destroy target after max distance |
If the checkbox is selected, set a value for the maximum distance in the Digital Twin. |