Adding and Configuring of TM3 CANopen Bus Coupler and Expansion Modules on the CANopen bus
Adding a TM3 CANopen Bus Coupler and Expansion Modules on the CANopen bus
You must add a CANopen manager under the node.
To add a TM3 CANopen bus coupler on the CANopen bus, select the in the , drag it to the , and drop it under CANopen manager of the .
For more information on adding a device to your project, refer to:
• Using the Drag-and-drop Method
• Using the Contextual Menu or Plus Button
Add the required expansion modules under . Refer to Adding a TM3 CANopen bus coupler.

Tabs Description
|
Tab |
Description |
|---|---|
|
|
The Node ID of the bus coupler is configured here. In addition, to access full options, such as node-guarding configuration, select . For more details, refer to Software > Communication > Device Editors > CANbus Configuration Editor > CAN-Based Fieldbuses > CANopen > CANopen Manager (Master) > CANopen Remote Device Slave Tab 'CANopen Remote Device - General’ found in the EcoStruxure Machine Expert online help.
NOTE: TM3 CANopen bus coupler cannot be configured as a sync producer.
|
|
|
EcoStruxure Machine Expert automatically creates, enables and maps the and to match the expansion modules after the bus coupler. This enables the bus coupler to properly exchange I/O data with the controller without requiring manual mapping. Hence, no manual configuration (adding/deleting/editing of PDO mapping) is enabled. Modification of the PDO properties is enabled. To do so, double-click the to open the window. Refer to CANopen Transmission and Monitoring.
NOTE: The bus coupler supports PDO transmission by Remote Transmission Request (RTR), hence this option is disabled.
|
|
|
EcoStruxure Machine Expert generates automatically the SDOs commands that will properly configure the bus coupler. Hence, no manual configuration is required or enabled.
NOTE: in must be enabled to display the detailed comments.
|
|
|
Provides information about the parameters associated with the bus coupler. |
|
|
Provides information about the variable name and type associated with the bus coupler. The bus coupler send information about its diagnostics to the controller. You can map this variable. |
|
|
You can access:
You can access the state of I/O modules and communication between bus coupler and controller. The states are described by:
NOTE: While the controller is in HALT state, the CANopen bus cannot update status information.
|
Special Configuration Associated with all TM2 / TM3 modules with Analog Inputs
CANopen supports data transmission through specific events. For analog inputs, this can be when input values falls below a threshold value (lower limit), exceeds an upper threshold (upper limit), or when the change in value exceeds the last transmitted value by a specified amount (delta). The event configuration can be done singularly or in combination. For example, if both upper limit of 5000 and delta of 100 is enabled and configured, then a value must both exceed 5000 and have changed by more than +/- 100 before it will be sent.
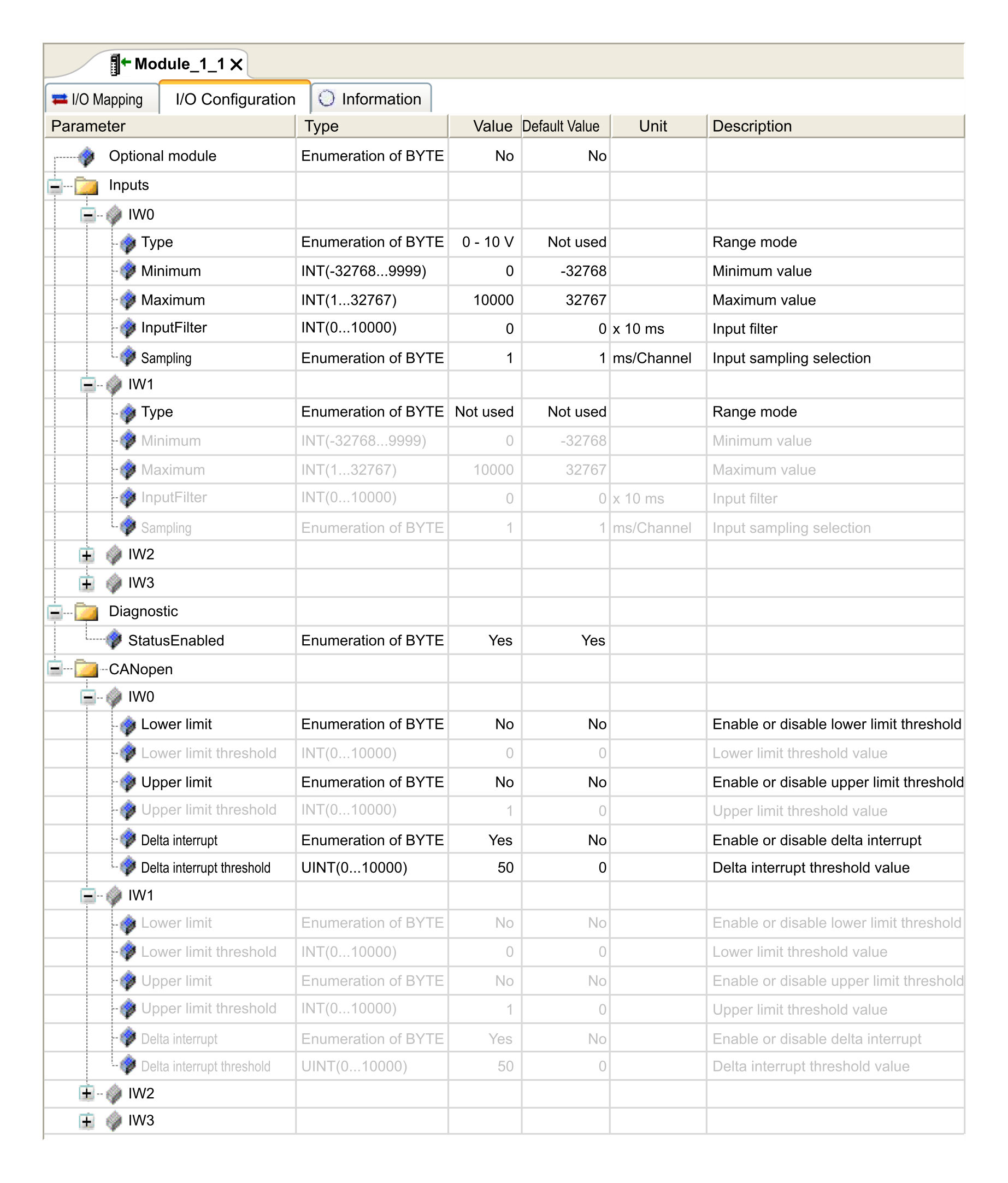
To perform the configuration, after double-clicking on appropriate Analog device, under tab, there will be a section titled . Each available channel will have an option to configure upper limit, lower limit and delta. Below shows an example. By default, upper and lower limit are disabled and delta is enabled with value of 50.
This graphic shows the configuration event when the channel is enabled and the channel is disabled in section:
Finally, analog input values intrinsically have some fluctuations over time. The level of fluctuations is partly dependent on the stability of the module input. Refer to the TM3 Analog I/O Modules - Hardware Guide to understand the capabilities of the modules used so that proper values are configured for the events.