Control_ATV
Descripción de funciones
Este bloque de funciones gestiona la palabra de control, la palabra de estado, la velocidad de referencia y la dirección de movimiento para la unidad.
Este bloque de funciones requiere una Adaptación de la asignación de E/S.
Biblioteca y espacio de nombres
Nombre de biblioteca: GMC Independent Altivar
Espacio de nombres: GIATV
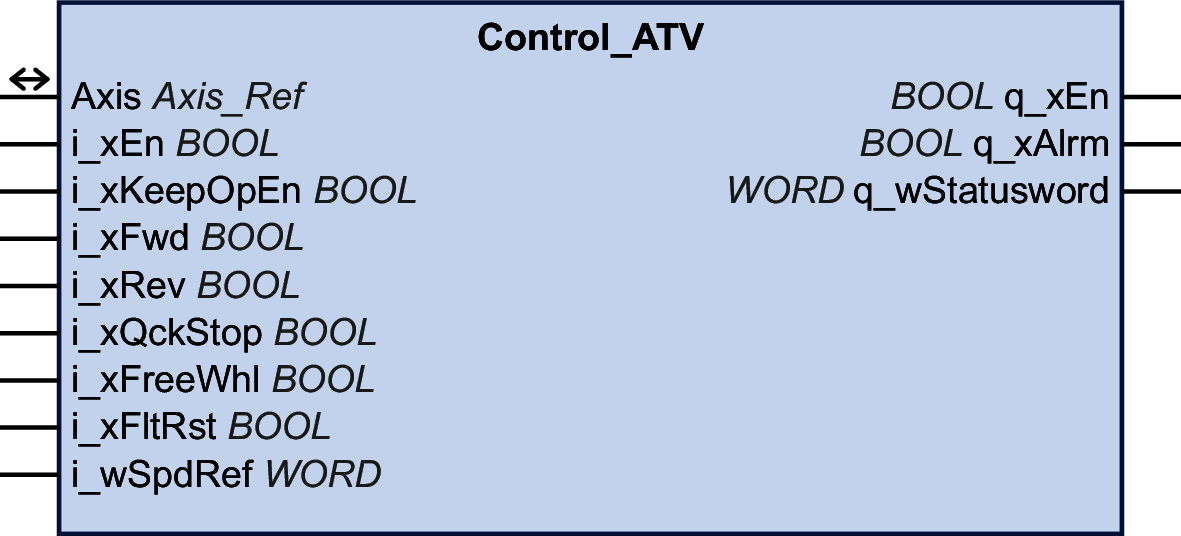
Entradas
|
Input |
Tipo de datos |
Descripción |
|---|---|---|
|
i_xEn |
BOOL |
Rango de valores: FALSE, TRUE. Valor predeterminado: FALSE. Comando para activar o desactivar el bloque de funciones.
|
|
i_xKeepOpEn |
BOOL |
Rango de valores: FALSE, TRUE. Valor predeterminado: FALSE.
|
|
i_xFwd |
BOOL |
Rango de valores: FALSE, TRUE. Valor predeterminado: FALSE.
|
|
i_xRev |
BOOL |
Rango de valores: FALSE, TRUE. Valor predeterminado: FALSE.
|
|
i_xQckStop |
BOOL |
Rango de valores: FALSE, TRUE. Valor predeterminado: FALSE.
|
|
i_xFreeWhl |
BOOL |
Rango de valores: FALSE, TRUE. Valor predeterminado: FALSE.
|
|
i_xFltRst |
BOOL |
Rango de valores: FALSE, TRUE. Valor predeterminado: FALSE.
Si la entrada i_xFltRst está establecida en TRUE, las entradas i_xFwd y i_xRev no se tienen en cuenta. |
|
i_wSpdRef |
WORD |
Rango de valores: Valor predeterminado: 0 Velocidad de referencia para la unidad. |
Salidas
|
Salida |
Tipo de datos |
Descripción |
|---|---|---|
|
q_xEn |
BOOL |
Rango de valores: FALSE, TRUE. Valor predeterminado: FALSE. Bloque de funciones activado/desactivado. Copia directa de i_xEn. |
|
q_xAlrm |
BOOL |
Rango de valores: FALSE, TRUE. Valor predeterminado: FALSE. Se establece en FALSE cuando el bloque de funciones está desactivado y cuando la unidad pasa al estado de funcionamiento "Switch On Disabled". Se establece en TRUE cuando la unidad detecta un error (bit 3 de la palabra de estado). |
|
q_wStatusword |
WORD |
Palabra de estado de la unidad. |
Entradas/salidas
|
Entrada/salida |
Tipo de datos |
Descripción |
|---|---|---|
|
Axis |
Axis_Ref |
Consulte el eje (instancia) para el que se ejecutará el bloque de funciones (corresponde al nombre del eje). El nombre de eje debe estar definido en el árbol de de EcoStruxure Machine Expert. |
Notas
Si ha activado este bloque de funciones, el uso simultáneo de otros bloques de funciones de las bibliotecas GMC Independent PLCopen MC y GMC Independent ATV puede provocar un comportamiento imprevisto.
| ADVERTENCIA | |
|---|---|
Observe lo siguiente:
Tras una parada rápida, se sale automáticamente del estado de funcionamiento “Quick Stop Active” cuando los valores de velocidad real y corriente real alcanzan el valor cero y si los comandos "Forward" y "Reverse" son FALSE. Para reiniciar el movimiento, desactive la parada rápida (establezca i_xQckStop en TRUE).
Una parada rápida tiene más prioridad que una parada normal ("Forward" y "Reverse" establecidos en FALSE).
Una parada en rueda libre tiene más prioridad que una parada de emergencia.
Si la unidad muestra el mensaje intermitente (COF) en la pantalla de siete segmentos después de descargar una aplicación en la unidad, se requieren un flanco ascendente y, a continuación, un flanco descendente en la entrada "Fault Reset" (i_xFltRst) para reiniciar la comunicación con la unidad.
Adaptación de la asignación de E/S (EtherNet/IP y Modbus TCP)
Si utiliza EtherNet/IP o Modbus TCP, debe ajustar la asignación de E/S de la unidad para utilizar este bloque de funciones.
La asignación de E/S de la unidad solo se puede ajustar con el software de puesta en marcha de DTM. Consulte EcoStruxure Machine Expert - Device Type Manager (DTM) - User Guide para obtener más información sobre el DTM.
Para EtherNet/IP, la biblioteca utiliza los ensamblados 100 y 101 y requiere la siguiente asignación:
-
Ensamblado 100 (controlador a unidad):
-
Primera palabra: CMD, dirección lógica 3201 (ajuste de fábrica)
-
Segunda palabra: LFRD, dirección lógica 8604 (ajuste de fábrica)
-
-
Ensamblado 101 (unidad a controlador):
-
Primera palabra: ETA, dirección lógica 3201 (ajuste de fábrica)
-
Segunda palabra: RFRD, dirección lógica 8604 (ajuste de fábrica)
-
Tercera palabra: LCR, dirección lógica 3204 (se debe añadir a la asignación)
-
Para Modbus TCP, la biblioteca utiliza el servicio de exploración de E/S y requiere la siguiente asignación:
-
Configuración de salidas del explorador de E/S (controlador a unidad):
-
Salida 1: CMD, dirección lógica 8501 (ajuste de fábrica)
-
Salida 2: LFRD, dirección lógica 8602 (ajuste de fábrica)
-
-
Configuración de entradas del explorador de E/S (unidad a controlador):
-
Entrada 1: ETA, dirección lógica 3201 (ajuste de fábrica)
-
Entrada 2: RFRD, dirección lógica 8604 (ajuste de fábrica)
-
Entrada 3: LCR, dirección lógica 3204 (se debe añadir a la asignación)
-
Uso del bloque de funciones
Inicio del bloque de funciones con la configuración predeterminada:
|
Paso |
Acción |
|---|---|
|
1 |
Desactivar "Free Wheel" (rueda libre): Establezca i_xFreeWhl en TRUE. |
|
2 |
Desactivar "Quick Stop" (parada de emergencia): Establezca i_xQckStop en TRUE. |
|
3 |
Activar el bloque de funciones: Establezca i_xEn en TRUE. |
|
4 |
Establecer una velocidad de referencia: Establezca i_wSpdRef en un valor distinto de cero. |
|
5 |
Iniciar un movimiento en dirección positiva ("Forward") o negativa ("Reverse"): Establezca i_xFwd o i_xRev en TRUE. |
Visualización
Visualización del bloque de funciones Control_ATV:
Consulte para obtener más información sobre la visualización de un bloque de funciones.
Con la configuración mínima anterior, se puede utilizar la visualización de este bloque de funciones para controlar la unidad. Tras la asignación de E/S de los 5 datos especificados anteriormente, se puede iniciar la unidad con la siguiente secuencia de pasos:
|
Paso |
Acción |
|---|---|
|
1 |
Haga clic en el botón para activar el bloque de funciones. |
|
2 |
Haga clic en el botón para desactivar la parada rápida. |
|
3 |
Haga clic en el botón para desactivar la ejecución libre. |
|
4 |
Especifique un valor de velocidad distinto de cero en revoluciones por minuto (en el campo junto al botón ). |
|
5 |
Haga clic en el botón . |
|
6 |
Compruebe que el botón no esté activado. |
|
7 |
Haga clic en el botón o : el motor realiza un movimiento en dirección positiva o negativa. |