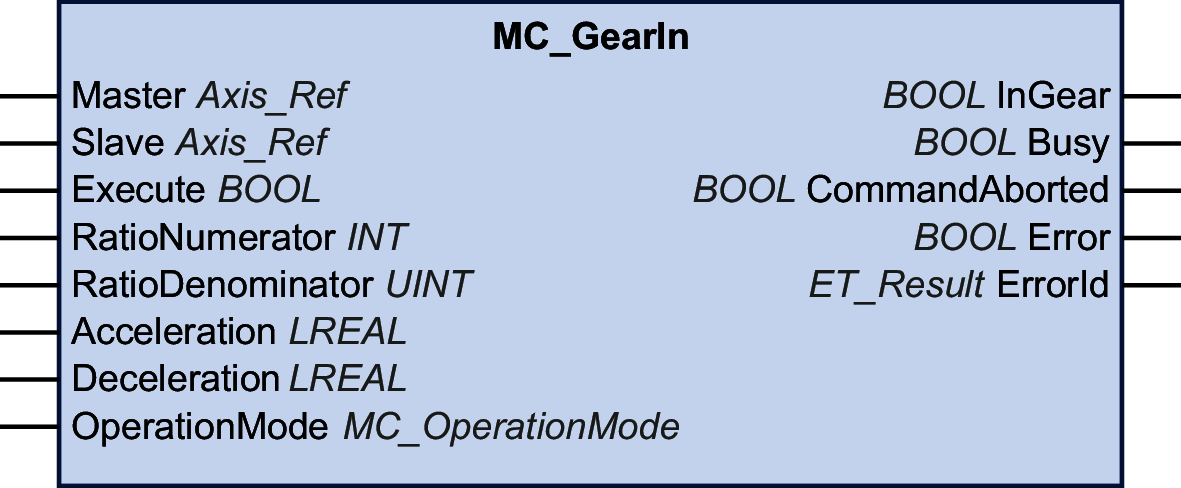
MC_GearIn
Descripción funcional
Este bloque de funciones activa el acoplamiento de un eje maestro y un eje subordinado con una relación de transmisión determinada entre la posición o la velocidad del eje maestro y del eje subordinado, en función de la modalidad de funcionamiento.
El eje subordinado sigue de manera síncrona el movimiento del eje maestro (sincronización de la posición o la velocidad).
Las entradas RatioNumerator y RatioDenominator permiten definir una relación de transmisión específica del usuario para el movimiento del eje subordinado.
-
En la modalidad operativa Cyclic Synchronous Position, el acoplamiento se ejecuta basándose en los valores de posición. Por ejemplo, con una relación de transmisión de 1:2, el eje subordinado se desplaza la mitad de la distancia del maestro.
-
En la modalidad operativa Cyclic Synchronous Velocity, el acoplamiento se ejecuta basándose en los valores de velocidad. Por ejemplo, con una relación de transmisión de 1:2, el eje subordinado se desplaza a la mitad de la velocidad del maestro.
Entradas
|
Entrada |
Tipo de datos |
Descripción |
|---|---|---|
|
Master |
Axis_Ref |
Referencia al eje para el que se ejecutará el bloque de funciones. |
|
Slave |
Axis_Ref |
Referencia al eje para el que se ejecutará el bloque de funciones. |
|
Execute |
BOOL |
Rango de valores: FALSE, TRUE. Valor predeterminado: FALSE. Un flanco ascendente de la entrada Execute inicia el bloque de funciones. El bloque de funciones continúa ejecutándose, y la salida Busy se establece en TRUE. Este bloque de funciones puede reiniciarse mientras se ejecuta. Los valores de destino se sobrescriben con los nuevos valores en el momento en que se produce el flanco ascendente. |
|
RatioNumerator |
INT |
Rango de valores: -2147483648...2147483647 Valor predeterminado: 1 numerador de relación de transmisión.
NOTA: El valor de 0 no es válido.
|
|
RatioDenominator |
UINT |
Rango de valores: 1...2147489647 Valor predeterminado: 1 Denominador del factor de engranaje. |
|
Acceleration |
LREAL |
Rango de valores: Un valor LREAL positivo Valor predeterminado: 0 Aceleración en unidades definidas por el usuario. El valor de esta entrada se utiliza para alcanzar la velocidad de destino especificada (aceleración). |
|
Deceleration |
LREAL |
Rango de valores: Un valor LREAL positivo Deceleración en unidades definidas por el usuario. Valor predeterminado: -1
NOTA: Si el valor predeterminado de -1 presentado en la entrada Deceleration se utiliza como señal de que el parámetro no se ha modificado, el valor de la entrada Acceleration también se utiliza para la deceleración.
Se trata del valor de umbral de la aceleración durante la fase de rampa de entrada de MC_GearIn en el caso de que el valor absoluto de la velocidad del eje subordinado disminuya. |
|
OperationMode |
Modalidad operativa para el bloque de funciones Valor predeterminado: Position |
Salidas
|
Salida |
Tipo de datos |
Descripción |
|---|---|---|
|
InGear |
BOOL |
Rango de valores: FALSE, TRUE. Valor predeterminado: FALSE.
|
|
Busy |
BOOL |
Rango de valores: FALSE, TRUE. Valor predeterminado: FALSE.
|
|
CommandAborted |
BOOL |
Rango de valores: FALSE, TRUE. Valor predeterminado: FALSE.
|
|
Error |
BOOL |
Rango de valores: FALSE, TRUE. Valor predeterminado: FALSE.
|
|
ErrorID |
Esta enumeración incluye información de diagnóstico. |
Notas
La entrada Acceleration necesita ajustarse en un valor mayor que 0 antes de ejecutar el bloque de funciones.
La relación de transmisión puede modificarse durante un movimiento. Sin embargo, los nuevos valores solo se tendrán en cuenta con el próximo flanco ascendente de la entrada Execute.
El eje subordinado solo utiliza los valores de Acceleration y Jerk durante la primera fase de aceleración. A continuación, el eje subordinado sigue al eje maestro.
Si la modalidad operativa se ajusta en Velocity a través de la entrada OperationMode y el variador no puede funcionar en la modalidad operativa Cyclic Synchronous Velocity, el bloque de funciones MC_CamIn detectará un error. El eje no queda afectado.
La biblioteca no incluye un bloque de funciones MC_GearOut separado. Un bloque de funciones en ejecución puede sustituirse por cualquier otro bloque de funciones.