IF_OBB – SetCenterHalfExtentsOrientation (Method)
Task
This method is used to initialize an OBB object by setting its center, half extents and orientation. The resulting list of vertices is evaluated accordingly.
Description
This method can be called multiple times to reconfigure the object.
The function GEM.FC_OrientationToRotationMatrix can be used for the conversion of the orientation from a roll, pitch and yaw representation to a 3D rotation matrix representation required by i_stOrientation.
Interface
Access: PUBLIC
|
Input |
Data type |
Description |
|---|---|---|
|
SE_Math.ST_Vector3D |
The center of the OBB bounding volume. |
|
|
i_stHalfExtents |
SE_Math.ST_Vector3D |
Each element of this 3D vector represents the half extents of the OBB object along the X-, Y- and Z-axes of the OBB frame. |
|
SE_Math.ST_Matrix3D |
Orientation of the OBB described as a rotation matrix. |
|
Output |
Data type |
Description |
|---|---|---|
|
q_xError |
BOOL |
The output is set to TRUE if an error has been detected during the execution. |
|
q_etResult |
ET_Result |
POU-specific output on the diagnostic; q_xError = FALSE -> Status message; q_xError = TRUE -> Diagnostic message. |
|
q_sResultMsg |
STRING(80) |
Event-triggered message that gives additional information on the diagnostic state. |
i_stCenter
Describes the position of the center of the OBB with reference to a global coordinate system.
The following figure shows the position of the center of an OBB object.

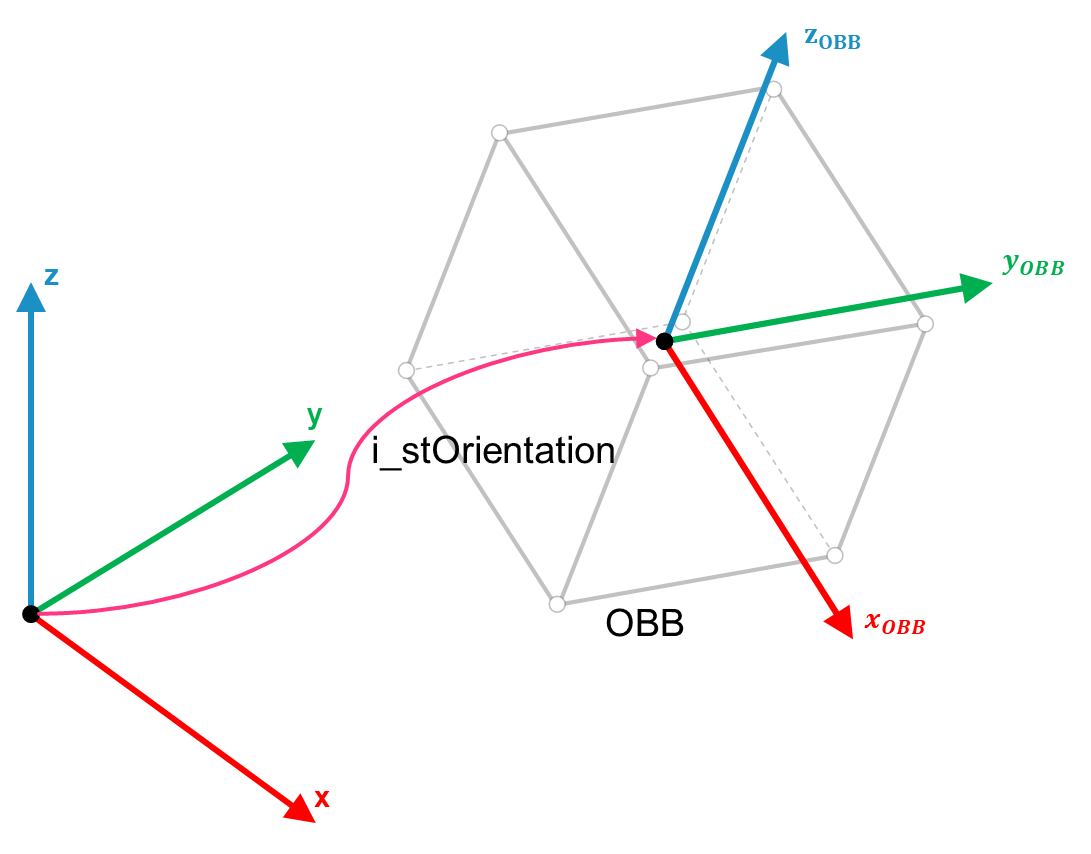
i_stOrientation
Describes the orientation of the OBB with reference to a global coordinate system.
The following figure shows the orientation of an OBB object:
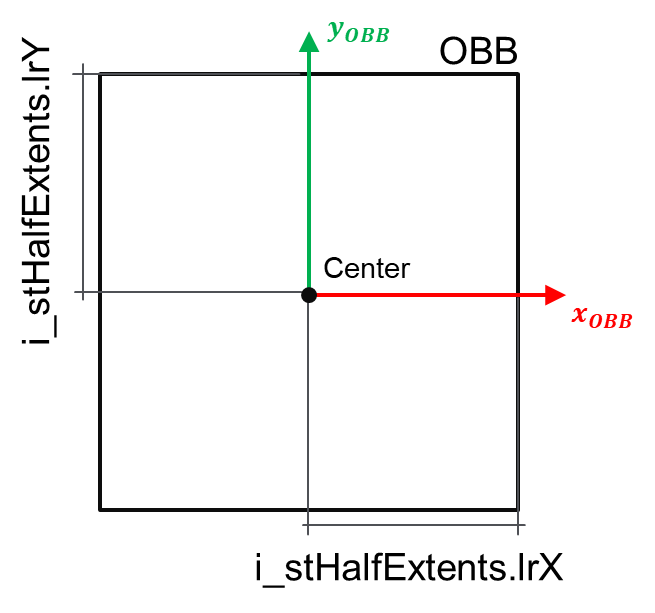
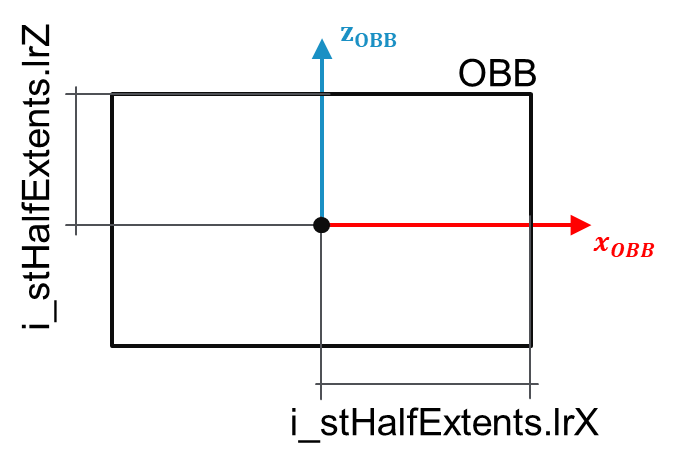
The following figure is a representation of the i_stHalfExtents parameters (XZ-plane view):
The following figure is a representation of the i_stHalfExtents parameters (XY-plane view):