General
When a tracking is started with IF_RobotMotion.ChangeCoordinateSystem(…), the synchronization phase uses the full resulting acceleration which was configured with the method IF_RobotMotion.SetMaxAccelerationResultant(…) for the component ET_RobotComponent.Tracking.
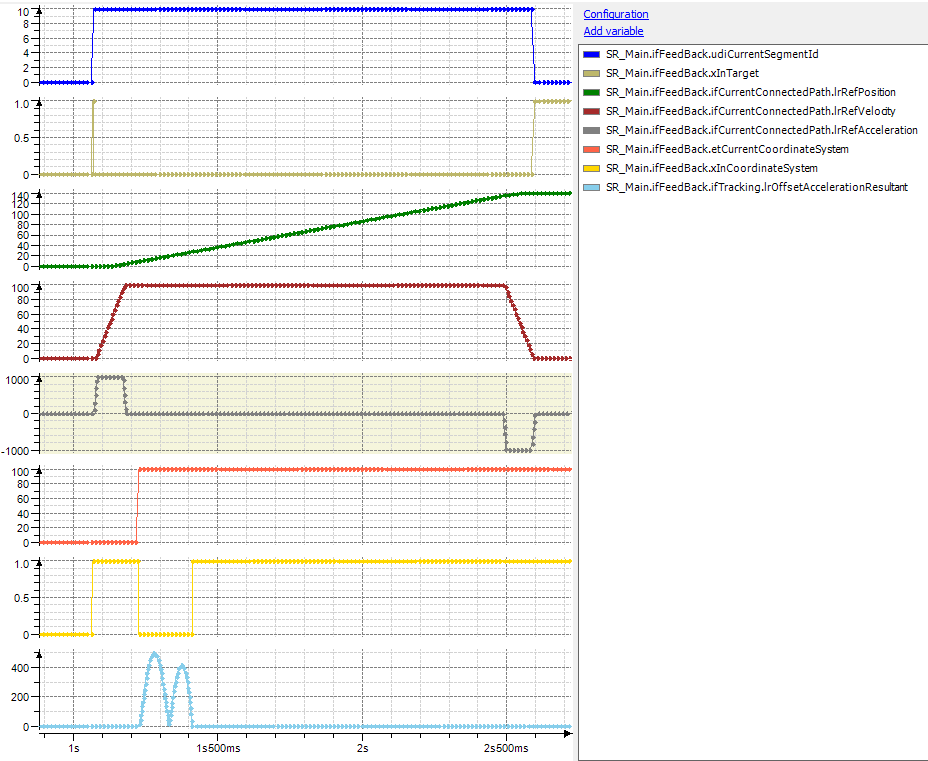
Trace
The trace displays that the synchronization phase uses the full resulting acceleration for tracking of 500 mm/sec2 to change the coordinate system. As the movement itself is much longer, it would not be necessary to perform the change so fast