IF_Configuration - SCARA4AxCoupling (Method)
Overview
|
Type: |
Method |
|
Available as of: |
V2.20.3.0 |
|
Versions: |
Current version |
This chapter provides information on:
Task
Configures a SCARA with four axes which has a coupling on the motors that perform the Z and OrientationZ motion.
Description
With the method SCARA4AxCoupling(…), the robot can be configured as a SCARA with four axes which uses a coupling for Z (translation movement along the mechanical Z axis) and OrientationZ (rotation about the mechanical Z axis).
The axes A and B move the robot in the XY-Plane, axis C moves the TCP in the Z direction and compensates the movements of axis D. Axis D turns the TCP about Z and compensates the movements of the axes A and B.
The axes A, B and D must be configured for a scaling in degrees (FeedConstant = 360) while axis C must be scaled in millimeters (FeedConstant = mm/revolution).
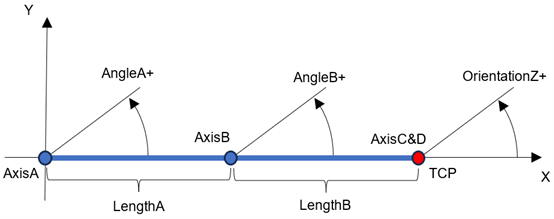
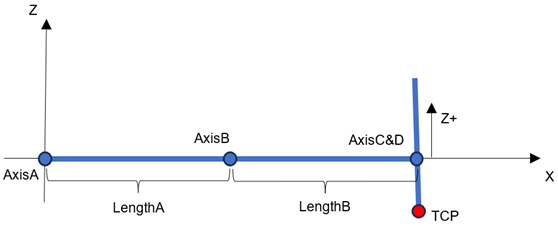
Coupling in transformation is defined as:
D = OrientationZ - A - B
C = Z - (D/360 * i_lrSlope)
Interface
|
Input |
Data type |
Description |
|---|---|---|
|
i_ifDriveA |
SystemConfigurationItf.IF_Drive
NOTE: For Modicon M262 Motion Controllers, the data type is CMI.IF_AxisIdentification.
|
Drive for axis A. |
|
i_ifDriveB |
SystemConfigurationItf.IF_Drive
NOTE: For Modicon M262 Motion Controllers, the data type is CMI.IF_AxisIdentification.
|
Drive for axis B. |
|
i_ifDriveC |
SystemConfigurationItf.IF_Drive
NOTE: For Modicon M262 Motion Controllers, the data type is CMI.IF_AxisIdentification.
|
Drive for axis C. |
|
i_ifDriveD |
SystemConfigurationItf.IF_Drive
NOTE: For Modicon M262 Motion Controllers, the data type is CMI.IF_AxisIdentification.
|
Drive for axis D. |
|
i_lrLengthA |
LREAL |
Length of the arm mounted on axis A. Value range: i_lrLengthA > 0 Unit: [mm] |
|
i_lrLengthB |
LREAL |
Length of the arm mounted on axis B. Value range: i_lrLengthB > 0 Unit: [mm] |
|
i_lrSlope |
LREAL |
Slope of the lift mechanic. Value range: i_lrSlope > 0 Unit: [mm]/[rev] |
|
Output |
Data type |
Description |
|---|---|---|
|
q_etDiag |
General, library-independent statement on the diagnostic. A value not equal to GD.ET_Diag.Ok corresponds to a diagnostic message. |
|
|
q_etDiagExt |
POU-specific output for the diagnostic. q_etDiag = ET_Diag.Ok -> status message q_etDiag <> ET_Diag.Ok -> diagnostic message |
|
|
q_sMsg |
STRING[80] |
Event-triggered message that gives additional information on the diagnostic state. |
Diagnostic Messages
|
q_etDiag |
q_etDiagExt |
Enumeration value |
Description |
|---|---|---|---|
|
OK |
Ok |
0 |
Ok |
|
ExecutionAborted |
ConfigurationAlreadyCompleted |
154 |
The configuration is already completed. |
|
ExecutionAborted |
TransformationAlreadyConfigured |
171 |
The transformation is already configured. |
|
InputParameterInvalid |
DriveAAlreadyInUse |
164 |
The drive A is already in use. |
|
InputParameterInvalid |
DriveAInvalid |
167 |
The drive A is invalid. |
|
InputParameterInvalid |
DriveBAlreadyInUse |
165 |
The drive B is already in use. |
|
InputParameterInvalid |
DriveBInvalid |
168 |
The drive B is invalid. |
|
InputParameterInvalid |
DriveCAlreadyInUse |
166 |
The drive C is already in use. |
|
InputParameterInvalid |
DriveCInvalid |
169 |
The drive C is invalid. |
|
InputParameterInvalid |
DriveDAlreadyInUse |
351 |
The drive D is already in use. |
|
InputParameterInvalid |
DriveDInvalid |
333 |
The drive D is invalid. |
|
InputParameterInvalid |
LengthARange |
262 |
The LengthA is out of range. |
|
InputParameterInvalid |
LengthBRange |
263 |
The LengthB is out of range. |
|
InputParameterInvalid |
SlopeRange |
408 |
The slope value is out of range. |
ConfigurationAlreadyCompleted
|
Enumeration name: |
ConfigurationAlreadyCompleted |
|
Enumeration value: |
154 |
|
Description: |
The configuration is already completed. |
|
Issue |
Cause |
Solution |
|---|---|---|
|
The configuration of the transformation was not successful. |
The configuration is already completed. |
Call the method SCARA4AxCoupling before calling of the method ConfigDone. |
DriveAAlreadyInUse
|
Enumeration name: |
DriveAAlreadyInUse |
|
Enumeration value: |
164 |
|
Description: |
The drive A is already in use. |
|
Issue |
Cause |
Solution |
|---|---|---|
|
The configuration of the transformation was not successful. |
The drive transferred at the input i_ifDriveA is already configured in the robot and cannot be used again. |
Do not assign a drive to the robot more than once. |
DriveAInvalid
|
Enumeration name: |
DriveAInvalid |
|
Enumeration value: |
167 |
|
Description: |
The drive A is invalid. |
|
Issue |
Cause |
Solution |
|---|---|---|
|
The configuration of the transformation was not successful. |
The drive transferred at the input i_ifDriveA is invalid. |
Transfer a valid drive to the input i_ifDriveA. |
DriveBAlreadyInUse
|
Enumeration name: |
DriveBAlreadyInUse |
|
Enumeration value: |
165 |
|
Description: |
The drive B is already in use. |
|
Issue |
Cause |
Solution |
|---|---|---|
|
The configuration of the transformation was not successful. |
The drive transferred at the input i_ifDriveB is already configured in the robot and cannot be used again. |
Do not assign a drive to the robot more than once. |
DriveBInvalid
|
Enumeration name: |
DriveBInvalid |
|
Enumeration value: |
168 |
|
Description: |
The drive B is invalid. |
|
Issue |
Cause |
Solution |
|---|---|---|
|
The configuration of the transformation was not successful. |
The drive transferred at the input i_ifDriveB is invalid. |
Transfer a valid drive to the input i_ifDriveB. |
DriveCAlreadyInUse
|
Enumeration name: |
DriveCAlreadyInUse |
|
Enumeration value: |
166 |
|
Description: |
The drive C is already in use. |
|
Issue |
Cause |
Solution |
|---|---|---|
|
The configuration of the transformation was not successful. |
The drive transferred at the input i_ifDriveC is already configured in the robot and cannot be used again. |
Do not assign a drive to the robot more than once. |
DriveCInvalid
|
Enumeration name: |
DriveCInvalid |
|
Enumeration value: |
169 |
|
Description: |
The drive C is invalid. |
|
Issue |
Cause |
Solution |
|---|---|---|
|
The configuration of the transformation was not successful. |
The drive transferred at the input i_ifDriveC is invalid. |
Transfer a valid drive to the input i_ifDriveC. |
DriveDAlreadyInUse
|
Enumeration name: |
DriveDAlreadyInUse |
|
Enumeration value: |
351 |
|
Description: |
The drive D is already in use. |
|
Issue |
Cause |
Solution |
|---|---|---|
|
The configuration of the transformation was not successful. |
The drive transferred at the input i_ifDriveD is already configured in the robot and cannot be used again. |
Do not assign a drive to the robot more than once. |
DriveDInvalid
|
Enumeration name: |
DriveDInvalid |
|
Enumeration value: |
333 |
|
Description: |
The drive D is invalid. |
|
Issue |
Cause |
Solution |
|---|---|---|
|
The configuration of the transformation was not successful. |
The drive transferred at the input i_ifDriveD is invalid. |
Transfer a valid drive to the input i_ifDriveD. |
LengthARange
|
Enumeration name: |
LengthARange |
|
Enumeration value: |
262 |
|
Description: |
The LengthA is out of range. |
|
Issue |
Cause |
Solution |
|---|---|---|
|
The configuration of the transformation was not successful. |
The value transferred at the input i_lrLengthA is not within a valid range. |
Transfer a valid value at the input i_lrLenghtA. Valid values are i_lrLenghtA > 0. Unit: [mm]. |
LengthBRange
|
Enumeration name: |
LengthBRange |
|
Enumeration value: |
263 |
|
Description: |
The LengthB is out of range. |
|
Issue |
Cause |
Solution |
|---|---|---|
|
The configuration of the transformation was not successful. |
The value transferred at the input i_lrLengthB is not within a valid range. |
Transfer a valid value at the input i_lrLenghtB. Valid values are i_lrLenghtB > 0. Unit: [mm]. |
Ok
|
Enumeration name: |
Ok |
|
Enumeration value: |
0 |
|
Description: |
Ok |
The configuration of the robot was successful.
SlopeRange
|
Enumeration name: |
SlopeRange |
|
Enumeration value: |
408 |
|
Description: |
The slope value is out of range. |
|
Issue |
Cause |
Solution |
|---|---|---|
|
The configuration of the transformation was not successful. |
The value transferred at the input i_lrSlope is not within the valid range. |
Transfer a valid value at the input i_lrSlope. Valid values are i_lrSlope > 0. Unit: [mm]/[revolution] |
TransformationAlreadyConfigured
|
Enumeration name: |
TransformationAlreadyConfigured |
|
Enumeration value: |
171 |
|
Description: |
The transformation is already configured. |
|
Issue |
Cause |
Solution |
|---|---|---|
|
The configuration of the transformation was not successful. |
The configuration of the robot transformation is already completed successfully. |
Call the configuration for a transformation only once. |