IF_TeachingCartesianPose - EstimateCartesianPose (Method)
Description
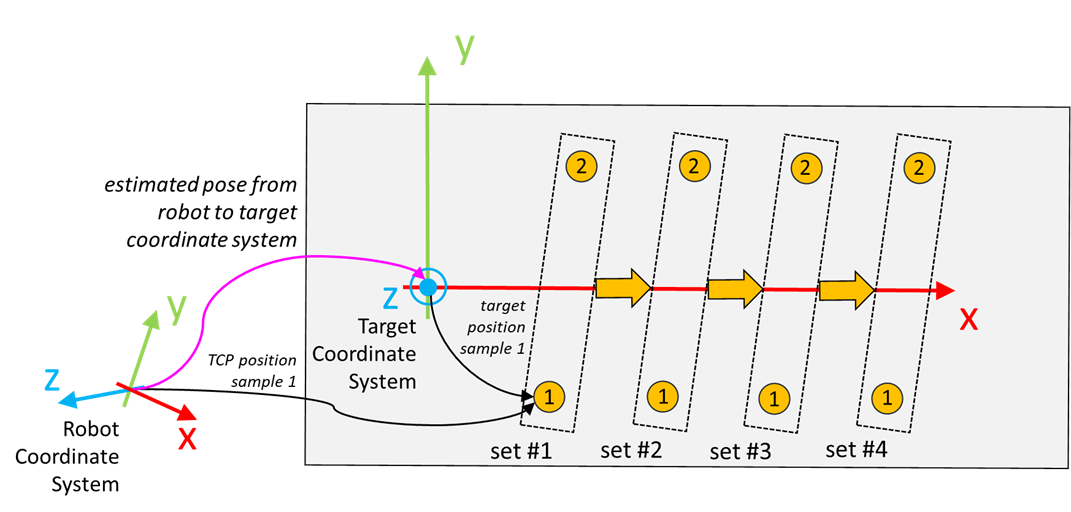
With the method EstimateCartesianPose(...), a cartesian pose from a source to a target coordinate system is estimated.
Example:
Access: PUBLIC
Interface
|
Input |
Data type |
Description |
|---|---|---|
|
i_etOrientationConvention |
GEM.ET_OrientationConvention |
Orientation convention that must be used for the estimated cartesian pose. Default value: GEM.ET_OrientationConvention.ZYX |
|
i_lrQualityTolerance |
LREAL |
Value used to make a comparison between the provided samples and the estimated pose. Refer to the outputs q_lrSamplesDirectionQuality and q_lrSamplesPlaneQuality for more information. Default value: 1.0 mm |
|
Output |
Data type |
Description |
|---|---|---|
|
q_xError |
BOOL |
TRUE: An error occurred during last command. For more information refer also to q_etResult and q_sResultMsg. |
|
q_etResult |
Provides diagnostic and status information. If q_xError = FALSE, then q_etResult provides status information. If q_xError = TRUE, then q_etResult provides diagnostic/error information. The enumeration ET_Result contains the possible values of the POU operation results. |
|
|
q_sResultMsg |
STRING[80] |
Event-triggered message that gives more detailed information on the diagnostic state. |
|
q_stPoseMatrix |
SE_MATH.ST_Matrix3D |
Estimated cartesian pose described as a 4D homogeneous transformation matrix. |
|
q_lrSamplesDirectionQuality |
LREAL |
Percentage value providing an indication of the quality of the estimated X direction. It depends on the number of samples that are more distant from the estimated X direction than i_lrQualityTolerance. Range: [0, 100] |
|
q_lrSamplesPlaneQuality |
LREAL |
Percentage value providing an indication of the quality of the estimated XY plane. It depends on the number of samples that are more distant from the estimated XY plane than i_lrQualityTolerance. Range: [0, 100] |
|
q_lrMaxErrorOnSamples |
LREAL |
Each provided sample is verified based on the estimated pose to verify that the estimation allows a correct reconstruction of the sample. This value represents the maximum measurement error found for the provided samples and their equivalent values calculated using the estimated pose. |