Funzioni SDIneg e SDIpos – Safe Direction Negative/Positive (direzione negativa/positiva di sicurezza)
Descrizione generale del funzionamento
La funzione di sicurezza Safe Direction (direzione di sicurezza) assicura che la rotazione / il movimento siano possibili solo nella direzione permessa (parametrizzata).
Il blocco di funzione distingue tra due sensi di rotazione / direzioni di movimento mettendo a disposizione ingressi separati per richiedere la funzione di monitoraggio SDI Negative o SDI Positive: SDIneg e SDIpos. Entrambe le funzioni di monitoraggio SDI si configurano con gli stessi parametri ma si possono richiedere l'una indipendentemente dall'altra.
A quale senso di rotazione / direzione di movimento fisico SDIpos o SDIneg corrisponde in pratica dipende dalla vostra applicazione.
Se SDIpos e SDIneg vengono richieste contemporaneamente, la funzione SS1 viene eseguita automaticamente come funzione di fallback definita.
La funzione SDIneg/SDIpos impedisce che il motore possa ruotare in direzione errata più di quanto definito (parametro dispositivo SDI_PositionTolerance[sTol], si veda sotto).
Monitoraggio del BF di sicurezza / modulo di sicurezza
La richiesta della funzione di sicurezza avviene all'inizio dell'intervallo di tempo t1 (segnale 'S_SDI*_Request' nel diagramma). t1 si imposta con il parametro di dispositivo SDI_StartDelayTime[t1].
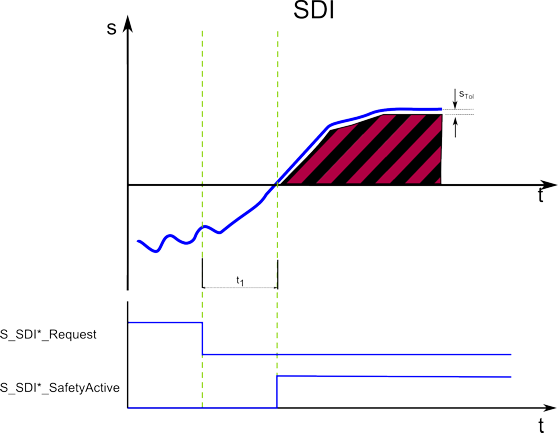
Entro l'intervallo di tempo t1 il controllore standard (non relativo alla sicurezza) riceve anch'esso la richiesta dal processo collegato e avvia la funzione di controllo del movimento in base alla logica e alla parametrizzazione del drive definita nell'applicazione standard (non relativa alla sicurezza).
Dopo il decorso di t1, la direzione viene monitorata rilevando la posizione attuale. Il movimento / la rotazione contrario/a alla direzione permessa è tollerato/a se non supera la tolleranza di posizione STol.
Se la funzione SDI viene eseguita correttamente, il blocco di funzione commuta a S_SDI*_SafetyActive = SAFETRUE (si veda il diagramma).
Se la funzione di fallback SS1 viene attivata a causa di un errore della tolleranza di posizione come descritto sotto, il corrispondente stato è segnalato da S_SS1_SafetyActive = SAFETRUE.
Funzione di fallback
Se la posizione effettiva si sposta nella direzione sbagliata più di quanto permesso dalla tolleranza di posizione impostata (parametro SDI_PositionTolerance[sTol]), viene eseguita automaticamente la funzione SS1 come funzione di fallback.
Applicazione
La funzione SDI viene usata per assicurare che la rotazione o il movimento non siano possibili in direzione proibita, ad esempio quando accede personale alla zona di operazione di una macchina.
Come implementare la funzione di sicurezza
Procedere come segue per implementare questa funzione di sicurezza nella vostra applicazione di sicurezza:
-
Nella finestra dei 'Dispositivi' di Machine Expert inserire un modulo di sicurezza per il drive utilizzato.
-
In Machine Expert – Safety, inserire un BF Preventa Motion SF_SafeMotionControl nel codice di sicurezza e collegarlo come occorre.
-
Nella finestra 'Dispositivi' di Machine Expert – Safety, marcare il modulo di sicurezza nell'albero dei dispositivi ed editare i parametri di sicurezza nel gruppo 'Mechanic' e nel gruppo 'SafeDirection'.
Per dettagli vedere la descrizione dei parametri del modulo opzionale di sicurezza Lexium 62 LXM/modulo opzionale di sicurezza Lexium 62 ILM.