Funzione SS2 – Safe Stop 2 (arresto in modo sicuro 2)
Descrizione generale del funzionamento
La funzione di arresto in modo sicuro SS2 realizza l'arresto rapido e controllato di un motore. Controlla autonomamente la decelerazione del drive e alla fine sorveglia lo stato di fermo (in modo simile alla funzione SOS). Come risultato, il motore continua a ricevere alimentazione ed è perciò capace di resistere a forze esterne; il controllo di posizione resta attivo per eseguire il monitoraggio dello stato di fermo.
(Per contrasto, la funzione Safe Stop 1 alla fine attiva la funzione STO invece di monitorare lo stato di fermo come SS2.)
SS2 realizza un arresto di sicurezza conforme a un arresto di categoria 2 secondo EN 60204-1.
Monitoraggio del BF di sicurezza / modulo di sicurezza
Il comportamento di monitoraggio del blocco di funzione dipende dalla parametrizzazione del modulo di sicurezza:
-
Se il monitoraggio rampa è disattivato, il monitoraggio resta passivo fino al decorso del tempo t2 (si vedano la figura e la descrizione qui sotto).
-
Se il monitoraggio rampa è attivato, il modulo di sicurezza sorveglia la decelerazione del motore come specificato nella rampa.
In entrambi i casi, la funzione SS2 ferma il motore e poi avvia il monitoraggio dello stato di fermo SS2.
La richiesta della funzione di sicurezza avviene all'inizio dell'intervallo di tempo t1 (segnale 'S_SS2_Request' nel diagramma). t1 si imposta con il parametro di dispositivo SS2_StartDelayTime[t1].
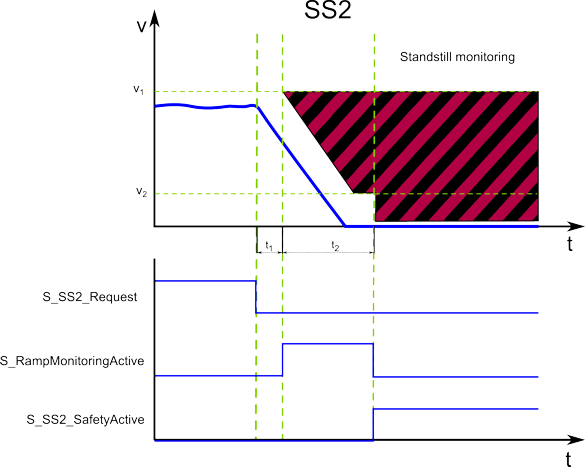
Entro l'intervallo di tempo t1, il controllore standard (non relativo alla sicurezza) riceve anch'esso la richiesta dal processo collegato e avvia la funzione di controllo del movimento in base alla logica e alla parametrizzazione del drive definita nell'applicazione standard (non relativa alla sicurezza).
Dopo il decorso di t1, la decelerazione del drive viene eseguita. La durata massima t2 permessa per questa fase di rampa discendente è definita dal parametro di dispositivo SS2_RampMonitoringTime[t2].
Al decorso di t2, la velocità deve essere zero e il monitoraggio dello stato di fermo (in modo simile a SOS) è attivato.
Durante t2, la decelerazione può essere monitorata impostando il parametro di dispositivo SS2_RampMonitoring = Activated.
Se il monitoraggio rampa è disattivato, la curva di decelerazione non viene monitorata. Durante t2 in questo caso è possibile anche un'accelerazione. Lo stato di fermo deve essere raggiunto al più tardi entro il tempo t2. Altrimenti viene attivata STO come funzione di fallback definita.
Se il monitoraggio rampa è attivato, la curva di decelerazione viene monitorata e deve corrispondere alla rampa parametrizzata (come in figura). Altrimenti STO viene attivata come funzione di fallback definita.
Se la velocità zero viene raggiunta prima del decorso di t2, una tolleranza di velocità definita dell'asse è permessa e viene monitorata in base a v2.
Se lo stato di fermo SS2 monitorato viene eseguito correttamente, il blocco di funzione commuta a S_SS2_SafetyActive = SAFETRUE (si veda il diagramma).
Altrimenti, se la funzione di fallback STO è stata attivata a causa di un errore come sopra descritto, il corrispondente stato viene segnalato da S_STO_SafetyActive = SAFETRUE.
Funzione di fallback
Se viene superato il valore parametrizzato SS2_RampMonitoringTime[t2] o (in caso di monitoraggio rampa attivato) se la rampa di decelerazione parametrizzata non è rispettata come definito o viene superata la tolleranza di posizione (sTol), viene automaticamente eseguita la funzione STO come funzione di fallback.
Applicazione
La funzione SS2 viene usata quando è richiesta la decelerazione controllata del drive con seguente monitoraggio dello stato di fermo, ad es. durante la messa in esercizio o dopo un evento rilevante per la sicurezza.
SS2 è idonea per arrestare il più rapidamente possibile una grande massa di volano o per rallentare e fermare il più rapidamente possibile un drive che gira ad alta velocità. Esempi tipici sono mandrini di rettifica, centrifughe, dispositivi di stoccaggio e prelievo.
Come implementare la funzione di sicurezza
Procedere come segue per implementare questa funzione di sicurezza nella vostra applicazione di sicurezza:
-
Nella finestra dei 'Dispositivi' di Machine Expert inserire un modulo di sicurezza per il drive utilizzato.
-
In Machine Expert – Safety, inserire un BF Preventa Motion SF_SafeMotionControl nel codice di sicurezza e collegarlo come occorre.
-
Nella finestra 'Dispositivi' di Machine Expert – Safety, marcare il modulo di sicurezza nell'albero dei dispositivi ed editare i parametri di sicurezza nel gruppo 'Mechanic' e nel gruppo 'SafeStop2'.
Per dettagli vedere la descrizione dei parametri del modulo opzionale di sicurezza Lexium 62 LXM/modulo opzionale di sicurezza Lexium 62 ILM.